47
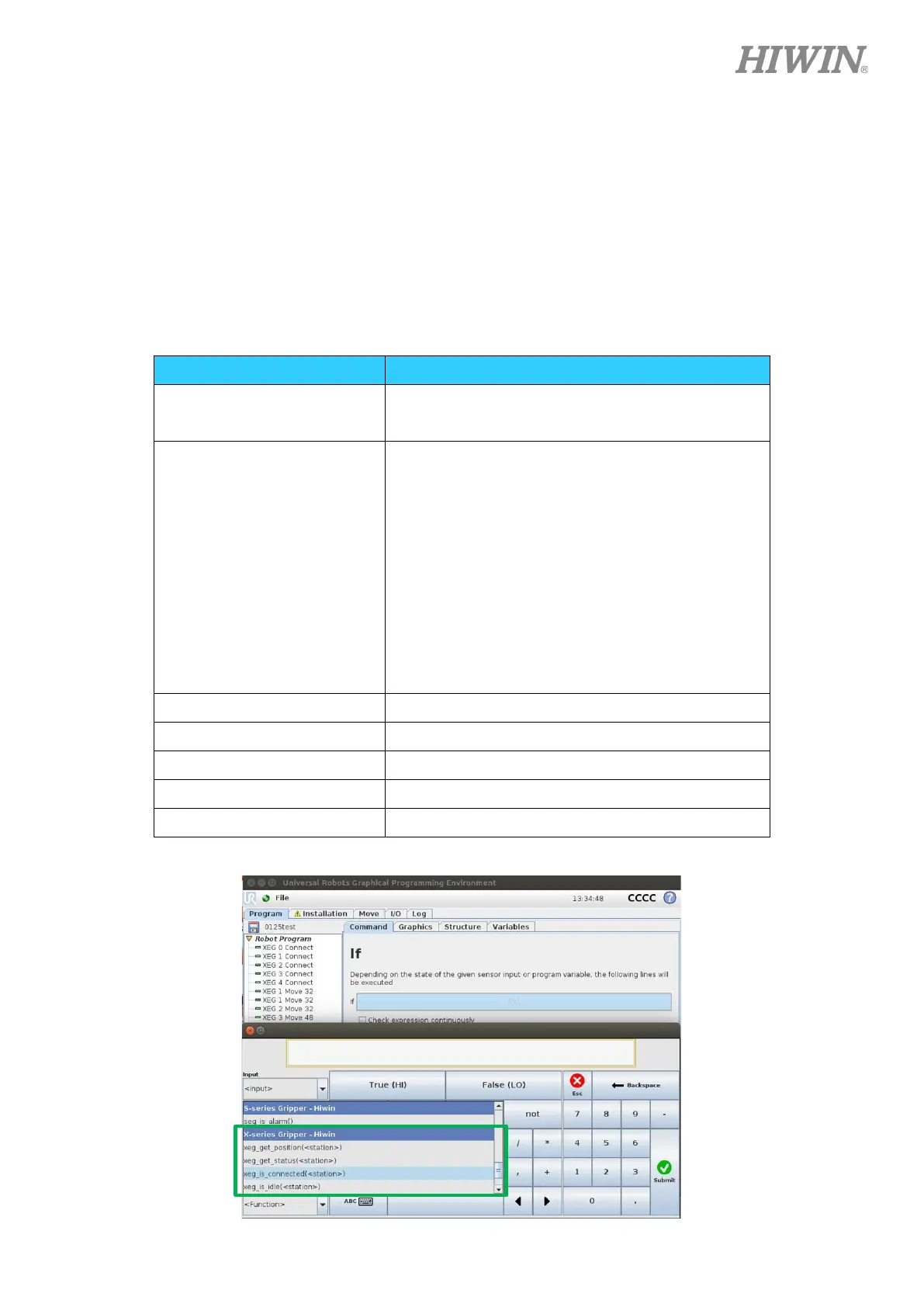
5.7. Other special functions
Different functions related to position feedback, connect, idle, position, alarm and hold signal are
provided. The user can use it depending on the application. The position feedback can be used to check
what the current position of the gripper is. The busy signal is on when gripper is executing the program.
The position signal is on when gripper executes MOVE command and moves to position exactly. The
alarm signal is on when some error shows up during gripper operation. The hold signal is on when
something has been gripped, note that this signal has to be checked only after a grip action.
XEG functions Description
xeg_get_position(station)
Get XEG gripper absolute position value.
(Unit: 0.01 mm)
xeg_get_status(station)
Get XEG gripper status code.
Code 0: idle state
Code 1: busy state
Code 2: moves to position exactly
Code 3: in a grasped state
Code 4: alarm state-position error
Code 5: alarm state-over stroke
Code 6: alarm state-reset error
Code 7: alarm state-emergency stop
xeg_is_connected(station)
Confirm XEG gripper is connected.
xeg_is_idle(station) Confirm XEG gripper is in an idle state.
xeg_is_in_position(station)
Confirm XEG gripper moves to position exactly.
xeg_is_alarm(station) Confirm XEG gripper is in an alarm state.
xeg_is_in_hold(station) Confirm XEG gripper is in a grasped state.
 Loading...
Loading...