50
Appendix.1:Example program
To set up the HIWIN Electric gripper with Universal Robot, a quick example is provided as below.
Universal Robot model:UR5 with CB3.0
Software version:Polyscope version above 3.14
URCap version: URCap 2.0
Gripper type:SEG-24
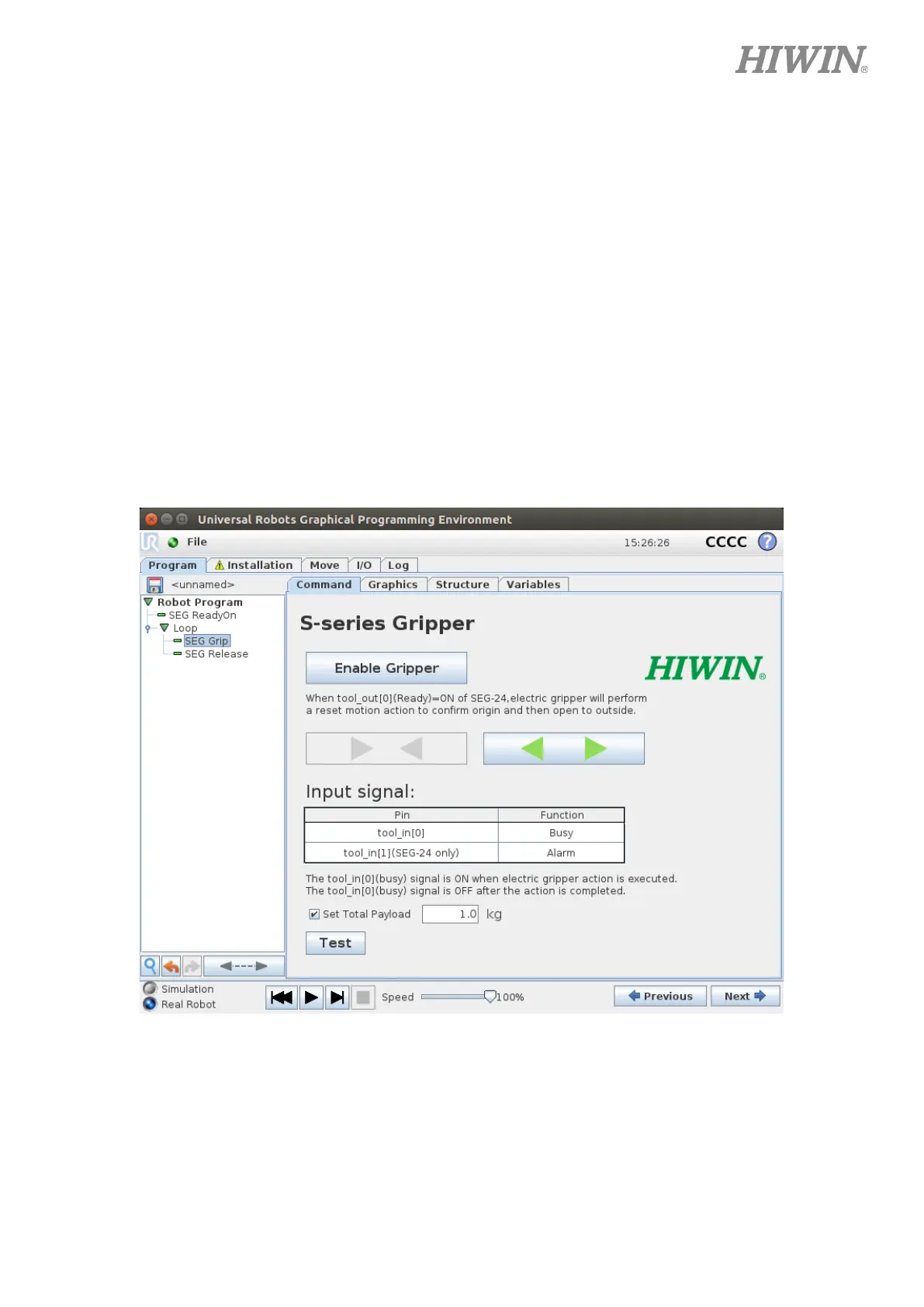
1. SEG ReadyOn → Initialize the center point of gripper under installation page. Normally, it happens
when the first time supply the power. Therefore, we put it before executing the main program.
2. SEG Grip → Set grip stroke with gripper side function button according to the actual application.
3. SEG Release → Set release stroke with gripper side function button according to the actual application.
 Loading...
Loading...