Shenzhen Hpmont Technology Co., Ltd. Chapter 7 Detailed Function Introduction
HD09 Series User Manual V1.1 -33-
Ref. Code Function Description Setting Range [Default]
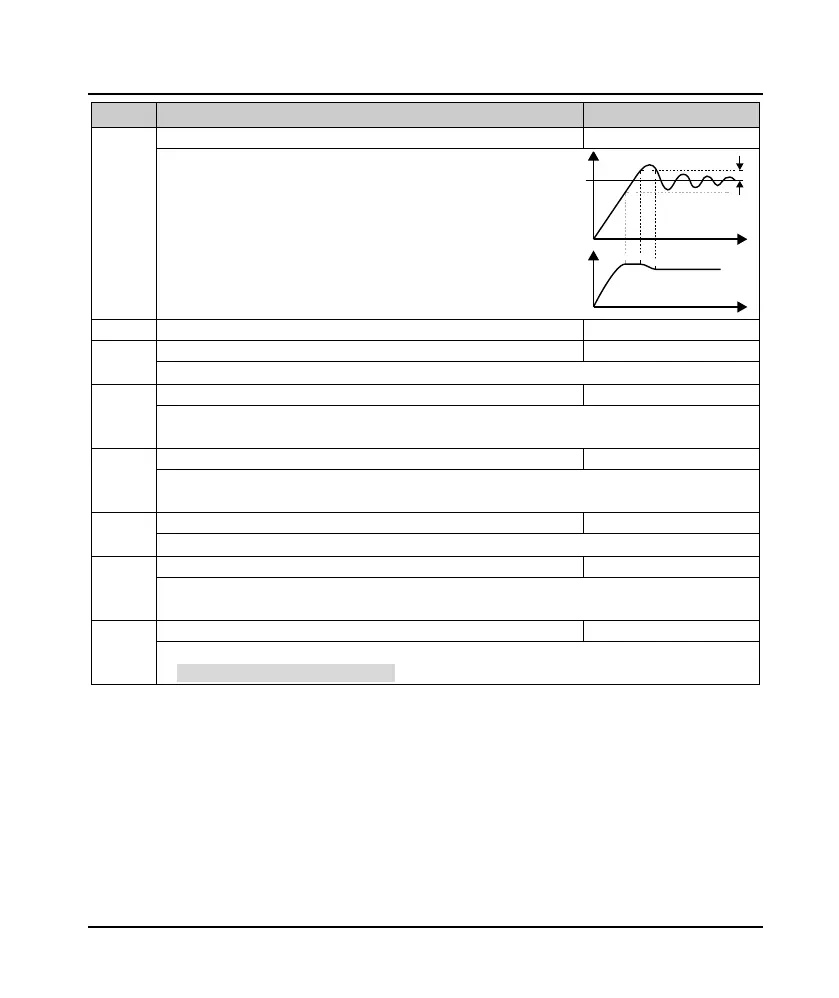
F04.10 Deviation limit 0.0 - 20.0 [2.0%]
Define maximum allowable deviation value.
Compared between the system output value and the
process PID value.
• When feedback is within F04.10, PID regulator stop
working. See as right diagram.
• Setting up appropriate F04.10 helps to balance the
system output accuracy and stability.
F04.13 PID regulator upper limit value 0.0 - Max. frequency [50.0Hz]
PID regulator lower limit value
0.0 - Max. frequency [0.0Hz]
It defines that the process PID regulator output digital setting value of upper limit or lower limit.
PID regulator characteristic
0: Positive. The motor RPM is required to increase with the increase of the reference.
1: Negative. The motor RPM is required to decrease with the increase of the reference.
Integral item selection adjustment
0: Reach upper and lower limit of the integral item and stop points.
1: Reach upper and lower limit of the integral item and continue points.
Define process PID output filtering time.
PID output reverse choice
0: PID adjust the inversion is prohibited. 0 to limit when PID output is negative.
1: PID output is allowed to reversal.
PID output inversion frequency limit
0.0 - Max. frequency [50.0Hz]
The upper limit of frequency defined PID inversion.
• F04.18 = 1 (PID adjust the allow reversal) valid.
Feedback value
Pre-given value
Time
Time
Out frequency
F04.10
 Loading...
Loading...
