trapulsPac - User Guide
Chapter 3 – Reference
3.2.3.7 - Profile Torque Mode
Profile Torque Mode
In this mode, the drive operates only with current loops and there is no speed or position control.
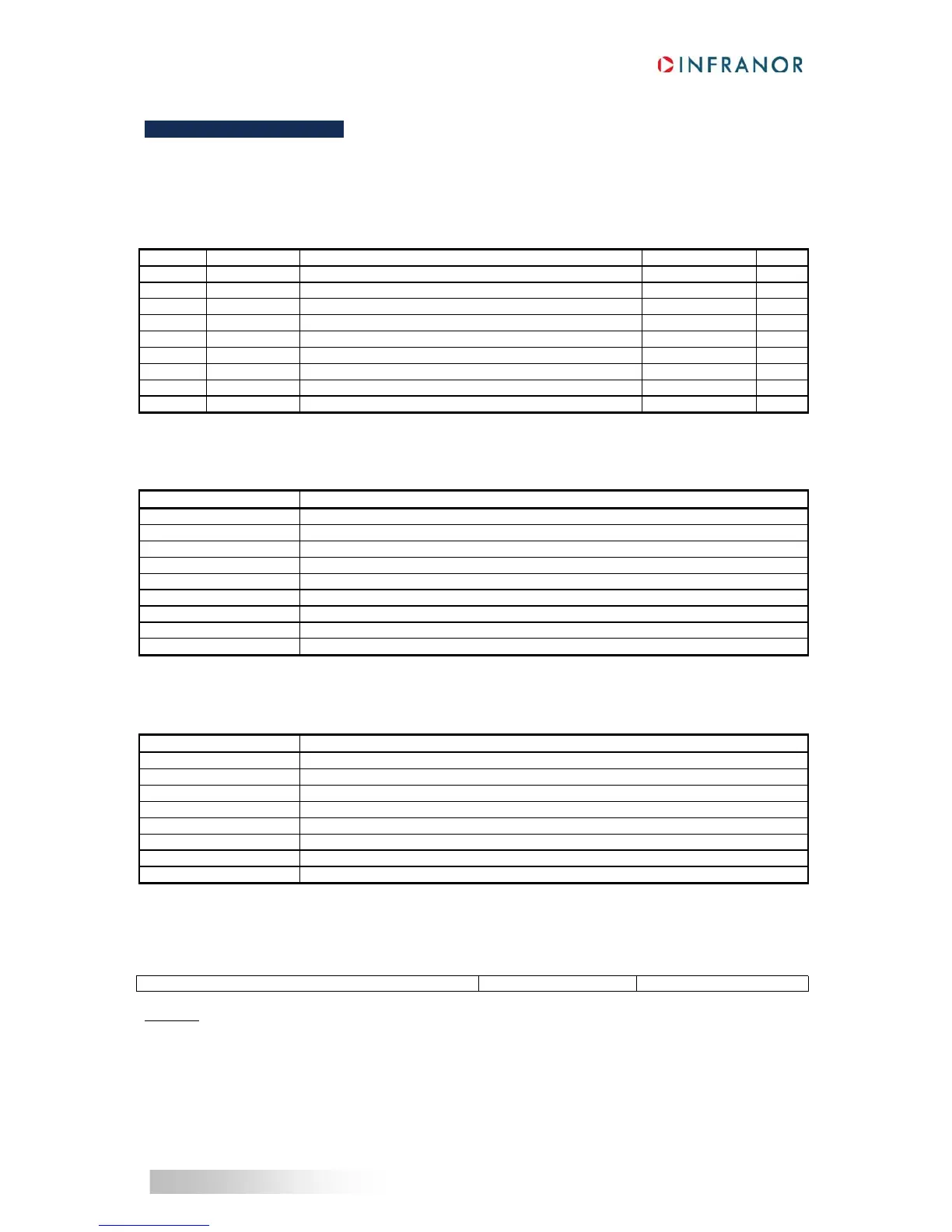
Object Dictionary Entries
Index Object Name Type
ttr.
0x6071 VAR Target Torque Integer16 rw
0x3071 VAR Target Torque Input Source Unsigned32 rw
0x6087 VAR Torque Slope Unsigned32 rw
0x6088 VAR Torque Profile Type Integer16 rw
0x60B2 VAR Offset Torque Integer16 rw
0x6074 VAR Torque Demand Value Integer16 ro
0x6077 VAR Torque Actual Value Integer16 ro
0x6078 VAR Current Actual Value Integer16 ro
0x6079 VAR DC Voltage Integer16 ro
Target Torque is the input value for the current loop in profile torque mode. The value is given per thousand of the
rated current (0x6075).
Index 0x6071
Name Target Torque
Object Code VAR
Data Type Integer16
Object Class pt
Access rw
PDO Mapping Possible
Unit per thousand of rated current (0x6075)
Value Range -
Default Value 0
Profile Torque Mode Input Source
Index 0x3071
Name Profile Torque Mode Input Source for Target Torque
Description Index/sub-index of input data
Data Type Unsigned32
Class pt
Access rw
PDO Mapping No
Value See below
Default Value 0x60710000
This object allows connecting any 16-bit dataflow as a target torque for the Profile Torque Mode.
The structure of the entries is the following:
MSB LSB
Index (16-bit) Sub-index (8-bit) 0
Example:
0x3071,0 = 0x30F10100
connects analog input 1 as the target torque for Profile Torque Mode.