trapulsPac - User Guide
Chapter 3 – Reference
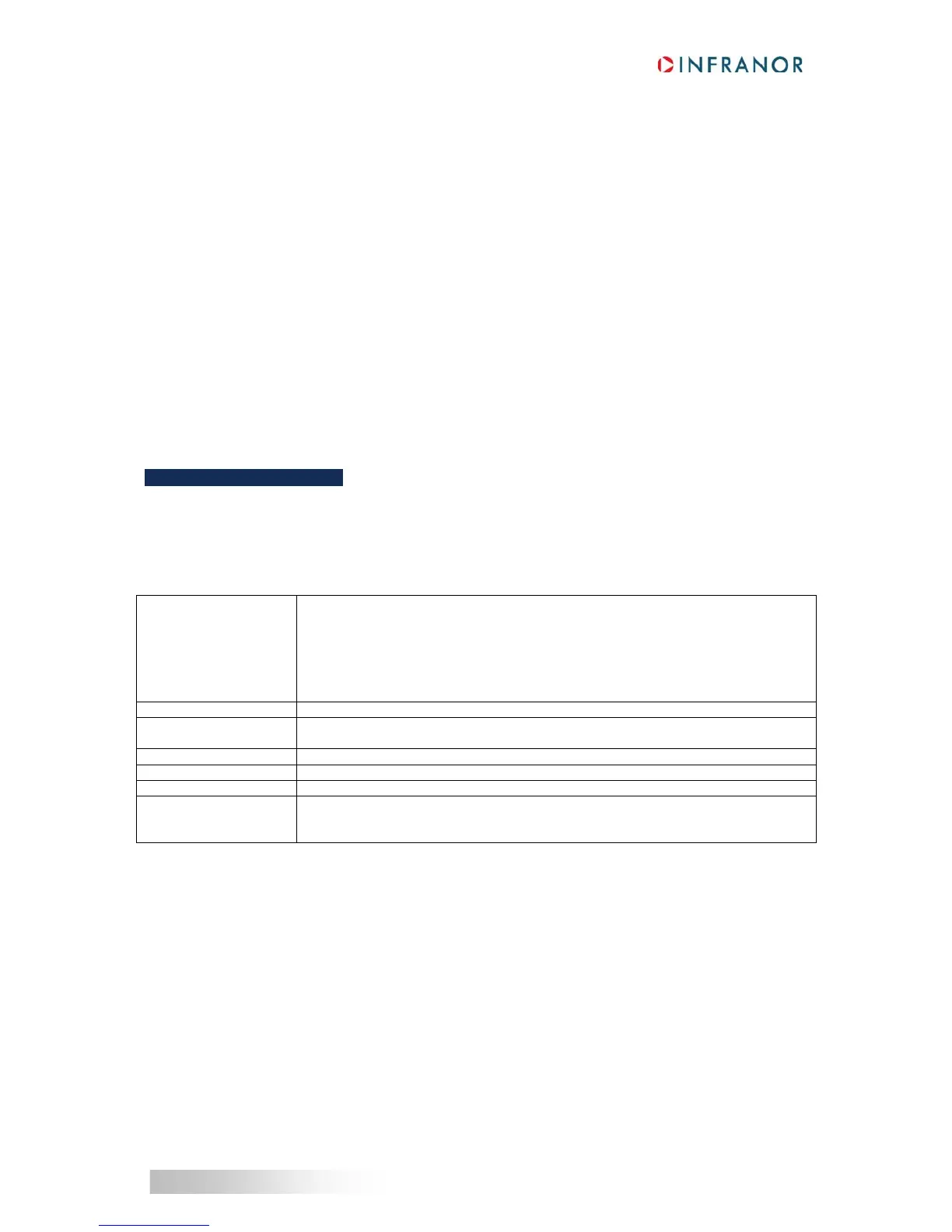
Supported keywords and parameters for a torque sequence
Keyword Direct parameter entry Description
SeqType 0x3611-1 Value = TORQUE for SEQUENCE.TXT file or
Value = 4 for direct parameter object
NextSeq 0x3611-2 See sequence parameters
SeqCount 0x3611-3 See sequence parameters
SeqLink 0x3611-4 See sequence parameters
Trigger 0x3611-5 See sequence parameters
Output 0x3611-6
0x3611-7
0x3611-8
See sequence parameters
StartCond 0x3611-9
0x3611-10
See sequence parameters
Speed 0x3611-15 Defines the speed setpoint of this sequence in velocity unit
Accel 0x3611-19 Defines the acceleration time in acceleration unit
RunTime 0x3611-24 Defines the running time in ms.
A value of 65535 corresponds a infinite running time.
Torque 0x3611-25 Defines the current limit in per thousand of the rated current
EndCond 0x3611-11
0x3611-12
See sequence parameters
3.2.3.8.5 - Gearing Sequence
The Gearing sequence is a sequence with gearbox function (see Gearbox Function for more information).
Gearing sequence parameters:
The main parameters for a gearing sequence are:
Config:
Defines the gearing behaviour:
- Exit Mode
- Trigger Mode
- Start Mode
- Ratio Set Select
- Ratio Modulation Enable
This parameter is defined like in the gearbox configuration 0x3928,1
Factor:
Defines the gearing ratio factor value
Acceleration:
Defines the acceleration value of the slave for acceleration phase, deceleration phase
and slave phase shift adjustment.
Differential speed:
Defines the differential speed for slave phase shift adjustment.
Master distance:
Defines the distance for the master from the start to the synchronization point.
Slave distance:
Defines the distance for the slave from the start to the synchronization point.
Synchronization
distance:
Defines the distance which the slave must be synchronized in position with.
If the synchronization distance is 0, then the slave will synchronize with the master
indefinitely. A stop condition can be used to exit the gearing sequence.
The master distance and the slave distance parameters must be adjusted so that the slave is synchronized before
the synchronization point.