5 Troubleshooting
5
- 33 -
Chapter 5 Troubleshooting
5.1 During Startup
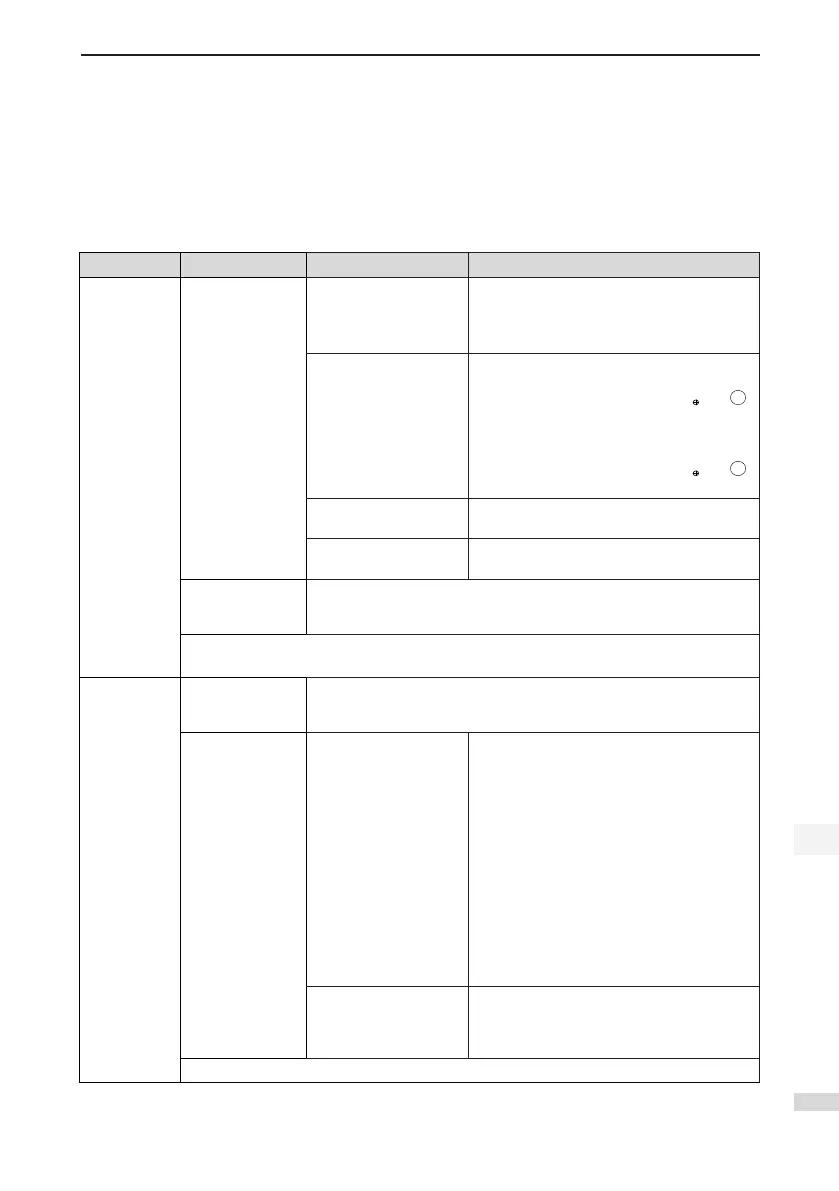
5.1.1 Position Control
During Startup Fault Symptom Cause Conrming Methods
Connect
control power
L1C/L2C and
main power
L1/L2 and R/S/
T.
The LED display is
not on or does not
display "rdy".
1. The control power
voltage is abnormal.
After disconnecting CN1, CN2, CN3 and CN4,
the fault persists.
Measure AC voltage between L1C and L2C.
2. The main power
voltage is abnormal.
For single-phase 220 V model, measure AC
voltage between L1 and L2. When DC bus
voltage amplitude (voltage between
and
)
is lower than 200 V, "nrd" is displayed.
For three-phase 220/380 V model, measure
AC voltage between R, S and T. When DC bus
voltage amplitude (voltage between
and
)
is lower than 460 V, "nrd" is displayed.
3. The program burning
terminal is shorted.
Check whether the program burning terminal is
shorted.
4. The servo drive is
faulty.
-
The operation
panel displays "Er.
xxx".
Remove the fault.
After the preceding causes are removed, the operation panel should display "rdy".
Set the S-ON
signal to ON.
The operation
panel displays "Er.
xxx".
Remove the fault.
Shaft of the servo
motor is in free
running status.
1. The S-ON signal is
invalid.
Set operation panel to servo status display and
view whether the operation panel displays "rdy"
rather than "run".
Check whether any parameter in groups H03
and H17 is set for FunIN1(S-ON). If yes, check
that the corresponding DI is set to ON. If not,
allocate the function and set the corresponding
DI to ON. See group H03 in Chapter 7 for
details on setting of input terminal parameters.
If a parameter in group H03 has been set for
FunIN1(S-ON) and corresponding DI is ON,
but the operation panel still displays "rdy". In
this case, check whether the DI terminal is
connected correctly by referring to Chapter 3 in
the IS650P User Manual.
2. Selection of control
mode is incorrect.
Check whether H02-00 is set to 1. If it is set to
2 (torque mode), motor shaft must be in free
running status because default torque reference
is 0.
After the preceding causes are removed, the operation panel should display "run".

 Loading...
Loading...