5 Troubleshooting
5
- 49 -
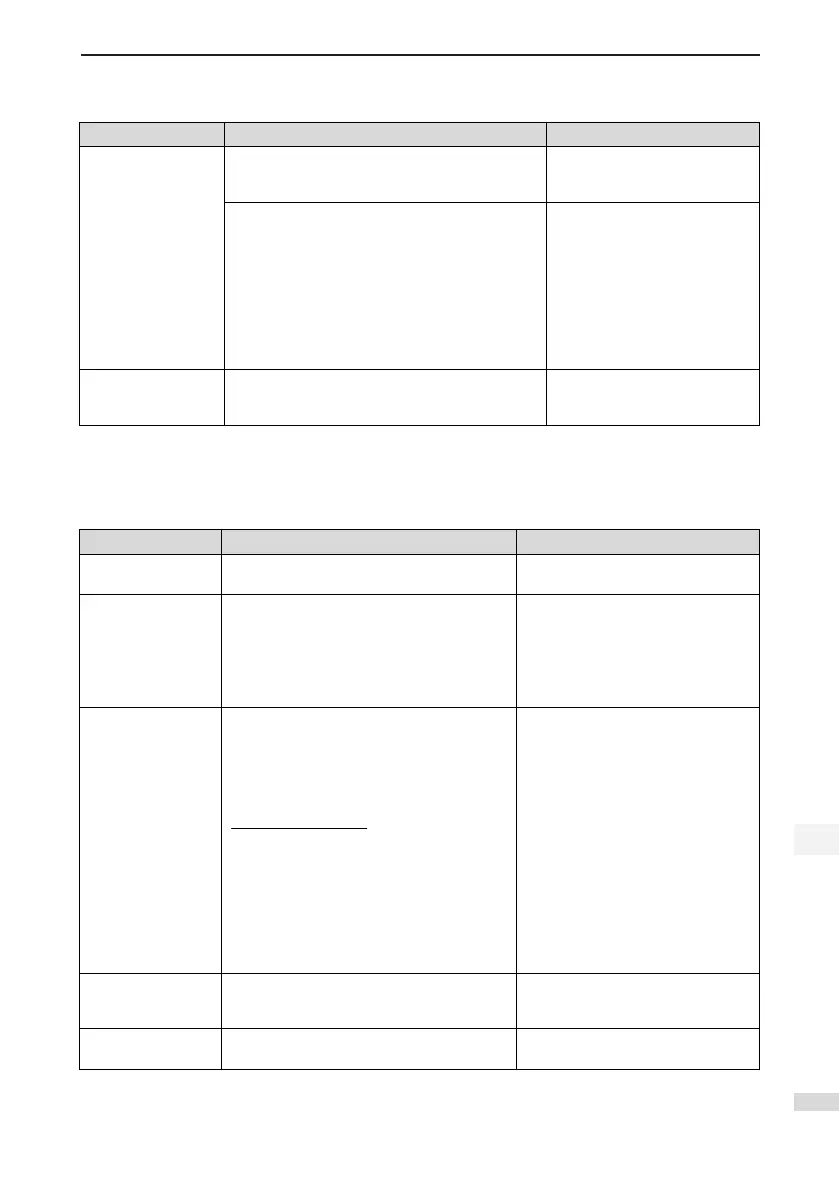
Er.430: Control power undervoltage
Cause Conrming Methods Corrective Action
1. The control power is
unstable or fails.
Check whether it is in the process of cutting off the
control power (L1C, L2C) or instantaneous power
failure occurs.
Re-power on the servo drive. If
the fault is abnormal power failure,
keep power supply stable.
Check whether input voltage of control cables
satises the following specication:
220 V AC drive:
Valid value: 220 to 240 V
Allowed error: -10% to 10% (198 to 264 V)
380V AC drive:
Valid value: 380 to 480 V
Allowed error: -10% to 10% (342 to 528 V)
Increase power capacity.
2. The control power
cables are in poor
contact.
Check whether control cables are well connected
and whether voltage of control cables (L1C, L2C)
satises preceding specication.
Re-connect or replace control
power cables.
Er.500: Overspeed
Cause:
Actual speed of servo motor exceeds overspeed level.
Cause Conrming Methods Corrective Action
1. UVW phase
sequence is incorrect.
Check whether UVW phase sequence on servo
drive is consistent with that on motor side.
Connect UVW cables according to
correct phase sequence.
2. The setting of H0A-
08 is incorrect.
Check whether overspeed level is smaller actual
maximum motor speed.
Overspeed level = 1.2 times of maximum motor
speed (H0A-08 = 0)
Overspeed level = H0A-08 (H0A-08 ≠ 0, and
H0A-08 < 1.2 times of maximum motor speed)
Reset overspeed level according to
actual mechanical requirement.
3 Input reference is
higher than overspeed
level.
Check whether motor speed corresponding to
input reference exceeds overspeed level.
When the reference source is pulse in the
position control mode: Motor speed (RPM) =
Input pulse frequency (Hz)
Encoder resolution
x Electronic gear ratio x
60
.
For IS650P servo drive, the encoder resolution
is 1048576P/r.
For IS600P servo drive, the encoder resolution
is 10000 P/r.
In position control:
When reference source is pulse, reduce
pulse frequency in the prerequisite
of ensuring accurate positioning or
decrease the electronic gear ration if
motor speed allows.
In speed control:
View speed reference and speed limit
(H06-06 to H06-09) and conrm that
they are within the overpseed level.
In torque control:
Set speed limit within the overspeed
level. For speed limit in torque control,
refer to the IS650P User Manual.
4. Motor speed
overshoots.
Check whether speed feedback exceeds
overspeed level through the drive debugging
platform of Inovance.
Adjust the gain or adjust mechanical
condition.
5. The servo drive is
faulty.
The fault persists after servo drive is re-powered
on.
Replace the servo drive.

 Loading...
Loading...