MD380 User Manual Desc
ription of Function Codes
- 153 -
Function Code Parameter Name Setting Range Default
F2-04 Speed loop integral time 2 0.01–10.00s 1.00s
F2-05 Switchover frequency 2
F2-02 to maximum
output frequency
10.00 Hz
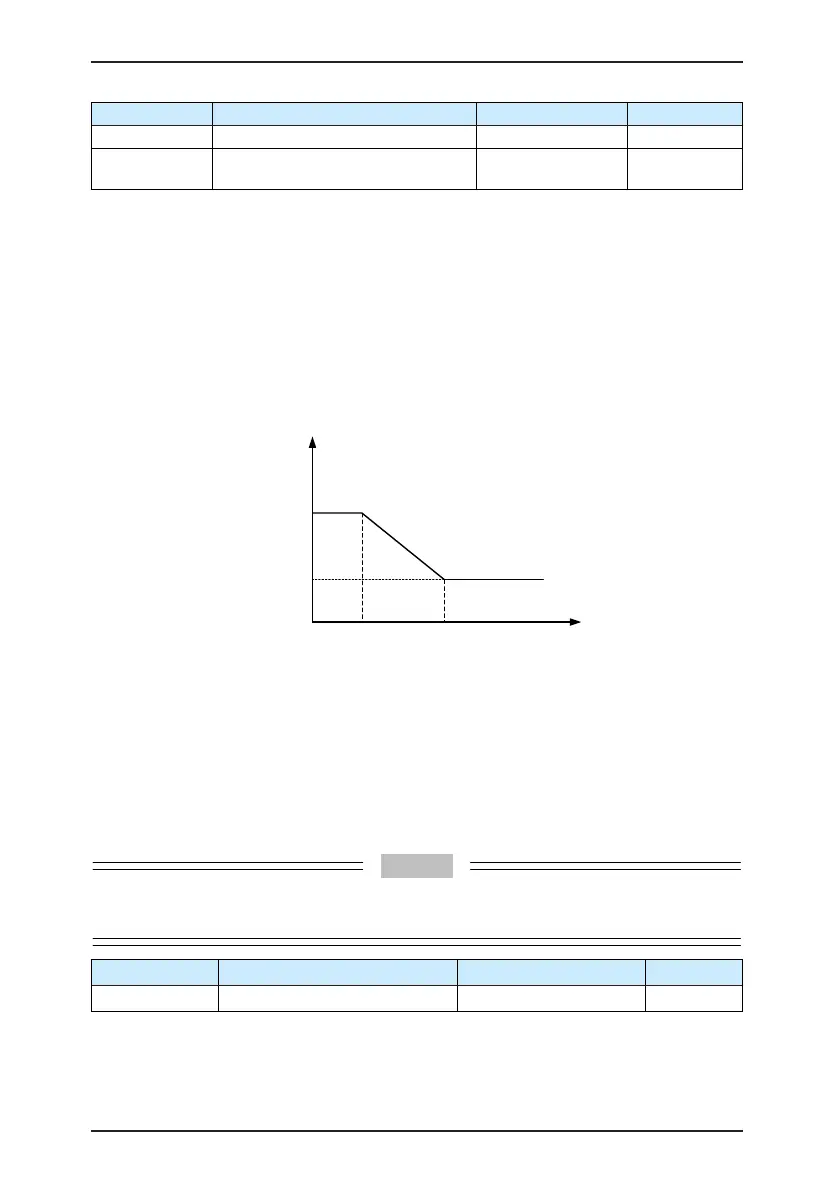
Speed loop PI parameters vary with running frequencies of the AC drive.
• If the running frequency is less than or equal to "Switchover frequency 1" (F2-02), the
speed loop PI parameters are F2-00 and F2-01.
• If the running frequency is equal to or greater than "Switchover frequency 2" (F2-05),
the speed loop PI parameters are F2-03 and F2-04.
• If the running frequency is between F2-02 and F2-05, the speed loop PI parameters
are obtained from the linear switchover between the two groups of PI parameters, as
shown in Figure 6-3.
Figure 6-3 Relationship between running frequencies and PI parameters
Frequency
reference
PI
parameters
F2-00
F2-01
F2-03
F2-04
F2-02 F2-05
The speed dynamic response characteristics in vector control can be adjusted by setting the
proportional gain and integral time of the speed regulator.
To achieve a faster system response, increase the proportional gain and reduce the integral
time. Be aware that this may lead to system oscillation.
The recommended adjustment method is as follows:
If the factory setting cannot meet the requirements, make proper adjustment. Increase the
proportional gain first to ensure that the system does not oscillate, and then reduce the
integral time to ensure that the system has quick response and small overshoot.
Improper PI parameter setting may cause too large speed overshoot, and overvoltage fault may
even occur when the overshoot drops.
Function Code Parameter Name Setting Range Default
F2-06 Vector control slip gain 50%–200% 100%
For SFVC, it is used to adjust speed stability accuracy of the motor. When the motor with
load runs at a very low speed, increase the value of this parameter; when the motor with
load runs at a very large speed, decrease the value of this parameter.

 Loading...
Loading...
