Description of Function Codes
MD380 User Manual
- 238 -
If "b" expresses the zero offset of received data, "k" expresses the gain, and "y" expresses
the actually used data. The actually used data can be obtained based on the formula:
y = kx + b
The value y ranges from -100.00% to 100.00%.
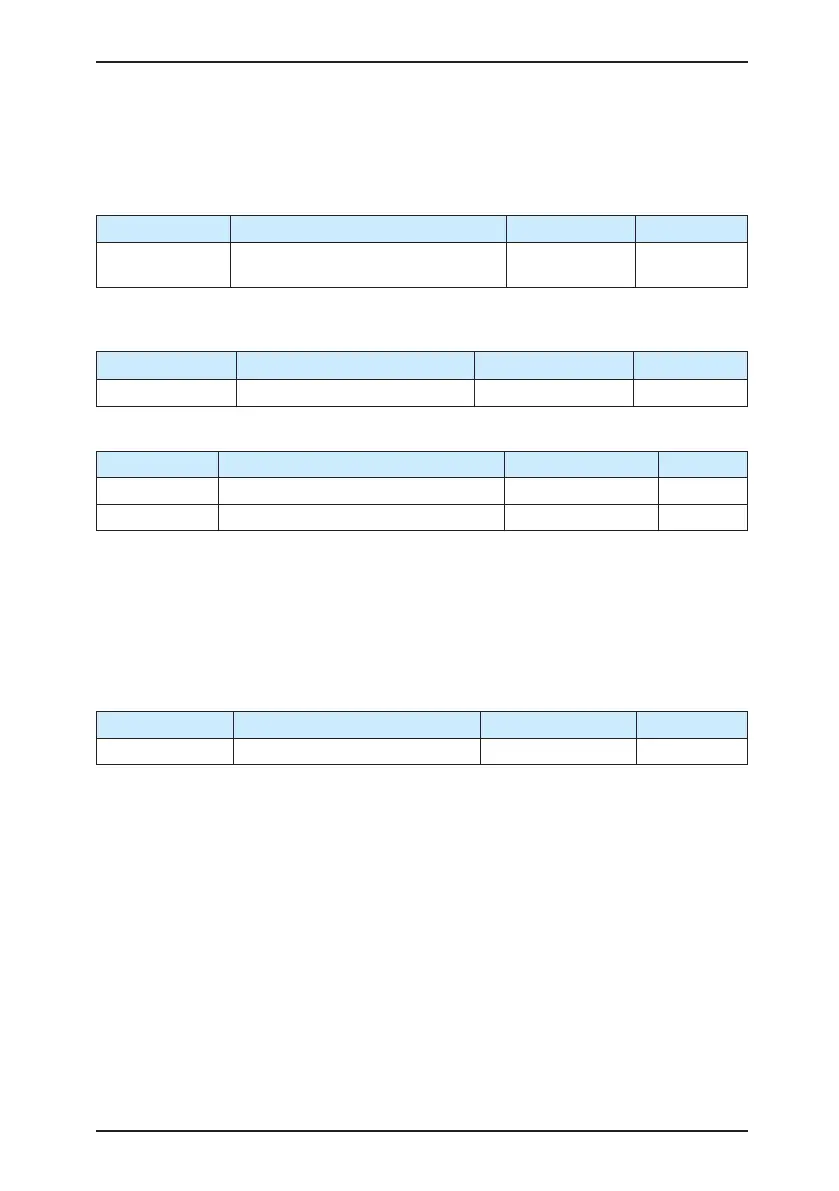
Function Code Parameter Name Setting Range Default
A8-06
Point-point communication interruption
detection time
0.0–10.0s 1.0s
It is used to set the point-point communication interruption time at which this fault is
detected. If it is set to 0, it indicates no detection.
Function Code Parameter Name Setting Range Default
A8-07 Master data sending cycle 0.001–10.000s
0.001s
It is used to set the data sending cycle of the master in point-point communication.
Function Code Parameter Name Setting Range Default
A8-08 Zero offset of received data (frequency) -100.00%–100.00% 0.00%
A8-09 Gain of received data (frequency) -10.00–10.00 1.00
These two parameters are used to adjust data received from the master and define the
frequency reference relationship between the master and the slave.
If "b" expresses the zero offset of received data, "k" expresses the gain, and "y" expresses
the actually used data. The actually used data can be obtained based on the formula:
y = kx + b
The value y ranges from -100.00% to 100.00%.
Function Code Parameter Name Setting Range Default
A8-10 Runaway prevention coefcient 0.00%–100.00%
10.00%
When the slave is set to troque control and follows the master to output torque to implement
load allocation, this parameter becomes active.
If it is set to 0.00%, it indicates that the runaway prevention function is disabled. If it is set to
another value, the system can effectively detects whether the slave is in the runaway state
and performs efcient protection. The recommended value range is 5.00%–20.00%.

 Loading...
Loading...
