E-Mail: keiths@interfaceforce.com
Technical changes reserved
TS Series Reaction Torque.doc
Internet: www.interfaceforce.com
2 Term Definitions
2.1 Terms
Measuring Side:
Shaft connection in which the torque to be measured is applied. Usually this side has the smallest
moment of inertia.
Drive Side:
The shaft end on the opposite side of the measuring side with the larger moment of inertia.
At static torque sensors the housing is fastened on this side.
Low Torque Resistance Side:
The shaft of the arrangement (drive, load) which can be turned considerably smaller with torque than the
nominal torque of the torque sensor M << M
nenn
.
2.2 Definition of the Pictograms on the Torque Sensor
The measuring side of the torque sensor is designated as follows:
More information can be found on the data sheet if needed.
3 Product Description
The sensor measures static and dynamic torques. The mounting position of the torque sensor is
horizontally or vertically.
Caution: it is to be differentiated between measuring side and drive side, see data sheet of the sensor:
http://www.interfaceforce.
com
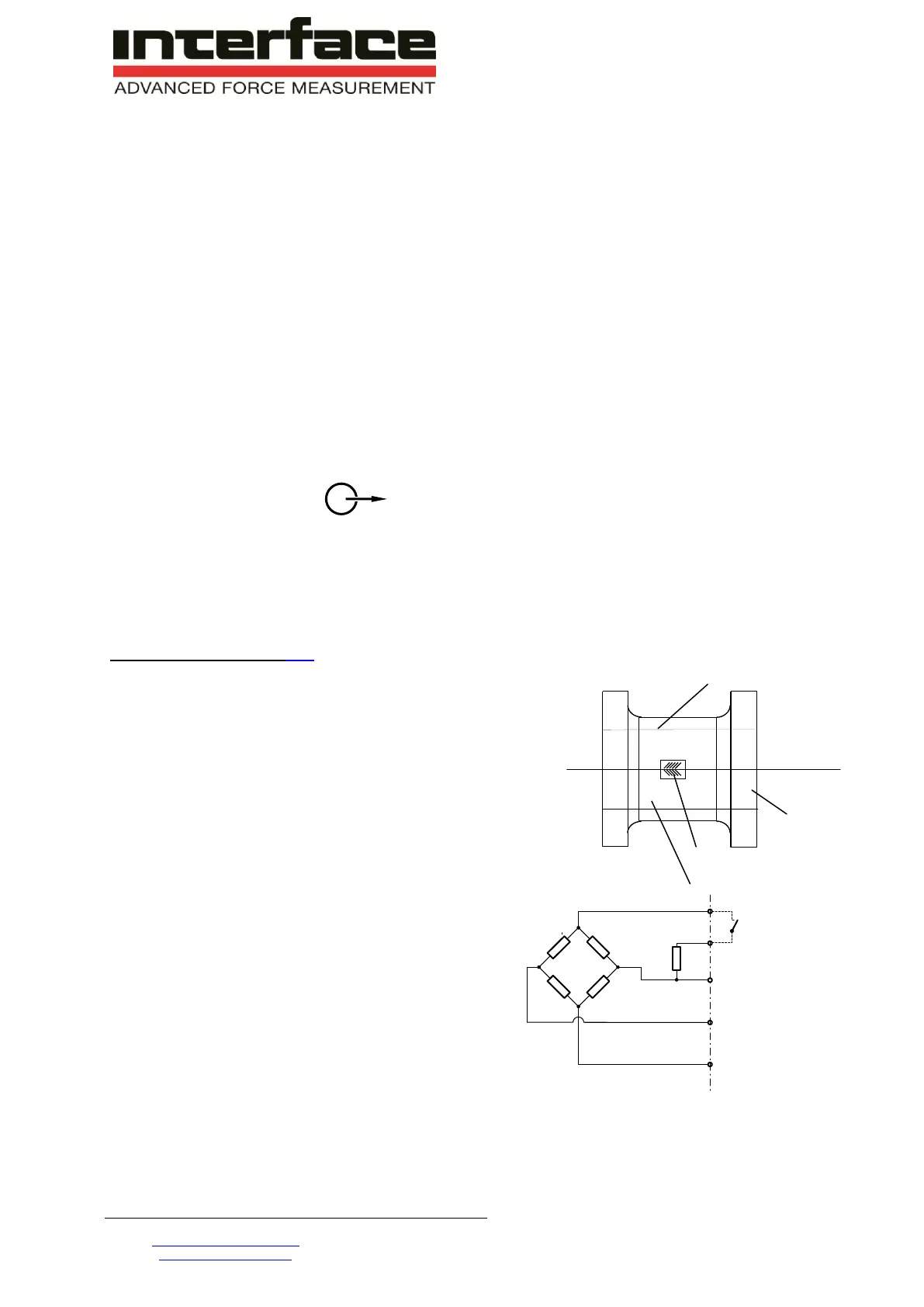
3.1 Mechanical Setup
The sensors do not contain rotary parts.
They consist of a torsion body with different connection
possibilities (flanges, shafts, square, hexagonal etc.). The
torsion body, applied with strain gauges, is protected by a
housing. A plug or a cable connection is fixed at the housing.
3.2 Electrical Setup
The strain gauge full bridge is directly connected at the
plug or at the cable.
Optionally a calibration control can be integrated. For
this, the SG full bridge gets detuned by an external
switch in such a way, that at the output the measuring
signal, which is corresponding to the positive nominal
torque, can be measured.
R
k
R
1
R
2
R
4
R
3
Supply +
Control
Signal +
Signal -
Supply -
external switch
SG
Sensor External
Basic sketch of the strain gauge full bridge
with option calibration control