E-Mail: keiths@interfaceforce.com
Technical changes reserved
TS Series Reaction Torque.doc
Internet: www.interfaceforce.com
6.4.2 Natural Resonances
Estimate of the mechanical natural frequencies:
21
0
11
2
1
JJ
cf
= Natural frequency in Hz
= Moment of inertia in kg*m²
= Torsional rigidity in Nm/rad
Operation of the device in natural resonance can lead to permanent damages.
6.5 Disturbance Variables
By disturbances, measured value falsifications can occur by
Vibrations,
Temperature gradients in the torque sensor,
Temperature changes,
Electrical disturbances,
Magnetic disturbances,
EMC (electromagnetic disturbances),
Therefore avoid these disturbance variables by decoupling of vibrations, covers, etc.
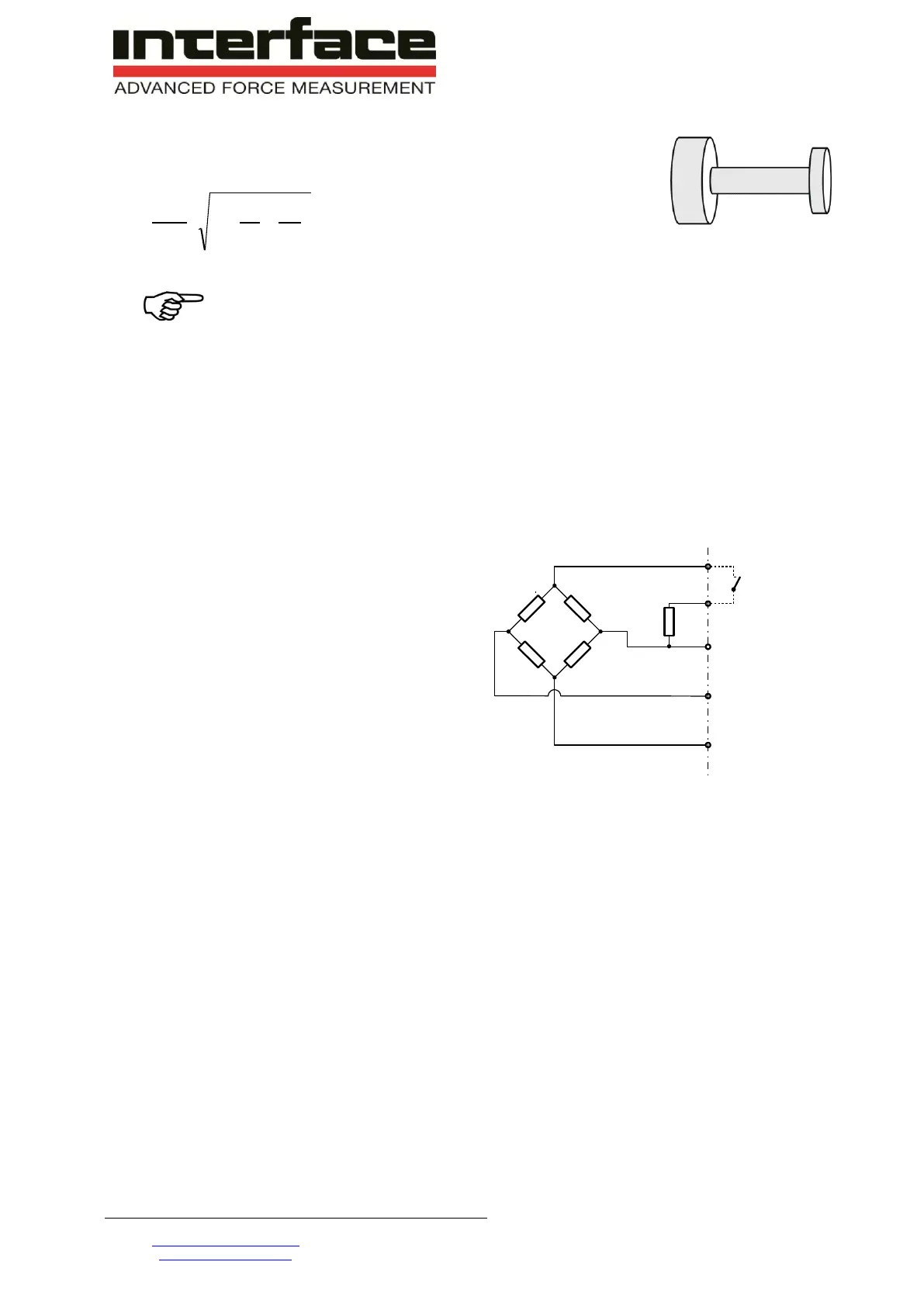
6.6 Calibration Control (Option)
By a control resistance, a signal is generated in the
sensor which corresponds to the nominal value of
the sensor.
Advantage:
Re-Calibrations are reduced. Before each
measurement the zero point and the nominal value
can be checked.
Function:
By applying positive SG supply, the measuring
bridge is electrically detuned, so that at the output a
measuring signal of 100% of the nominal value is
available.
Optionally 50%, 80% possible.
Use calibration control at unloaded torque sensor, only.
R
k
R
1
R
2
R
4
R
3
Supply +
Control
Signal +
Signal -
Supply -
external switch
SG
Sensor External