The offset-compensated ohms setting is saved with the measurement function. If you change
measurement functions, then return to the previous function, the offset-compensated ohms will be at
the same setting it was previously.
dmm.offsetcompensation is a common command and is shared with fourwireohms,
drycircuit, threertd and fourrtd. To activate dmm.offsetcompensation, select the
function first, and then send dmm.offsetcompensation = dmm.ON or OFF.
Filter
You can use the digital filter to stabilize noisy measurements. When the filter is applied, the
displayed, stored, or transmitted reading is a windowed-average of a number of reading conversions
(from 1 to 100).
The Series 3700A is a low-noise instrument; filtering may not be necessary for most applications. By
default, the filter setting is set to OFF.
The filter setup is saved specific to each measurement function (DC volts, AC volts, DC current, AC
current, two-wire ohms, four-wire ohms, commonside ohms, and temperature). When you select a
function, the instrument will return to the last filter that was set up for that function.
The various instrument operations, including filter, are performed on the input signal in a specific,
predetermined order. For example, if both relative offset and MXB (a math operation) are enabled,
the relative offset operation will always be performed before MXB.
Filter characteristics
In general, the digital filter places a specified number of A/D conversions (the filter count) into a
memory stack. These A/D conversions must occur consecutively within a selected reading window
(the filter window). The readings in the stack are then averaged to yield a single filtered reading. The
stack can be filled using the moving or repeating average filters.
Digital filter types
There are two digital filter types: Moving and repeating.
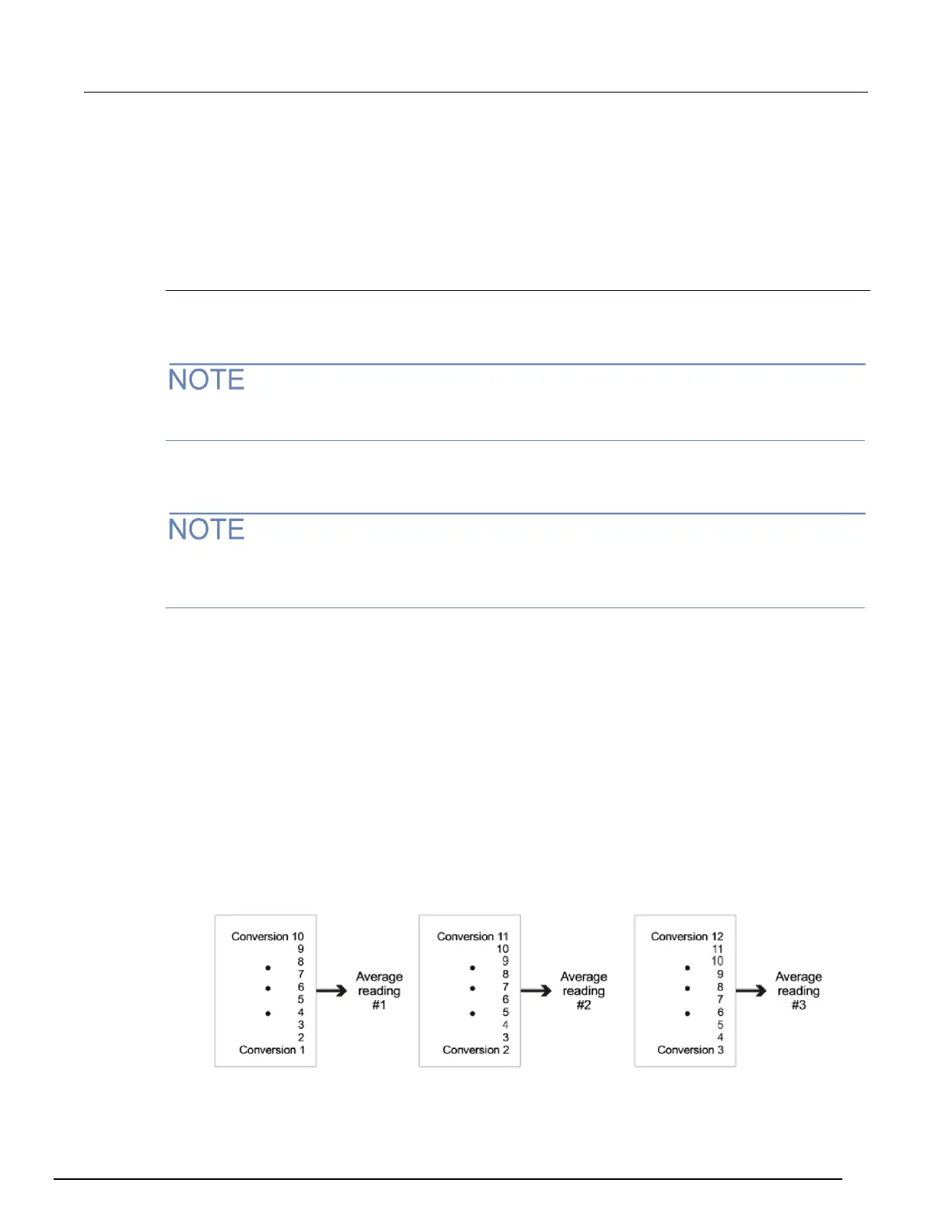
Moving average filter
The moving average filter uses a first-in first-out stack, where the newest reading conversion replaces
the oldest. An average of the stacked reading conversions yields a filtered reading. After the specified
number of reading conversions (filter count) fill the stack, the moving filter gives a new reading for
every new conversion.
Figure 72: Moving average filter
 Loading...
Loading...