4 — PROGRAMMABLE PARAMETERS
pg. 141
Return to TOC Curtis AC F2-A, F4-A, F6-A Motor Controllers – FOS 4.5 – April 2022
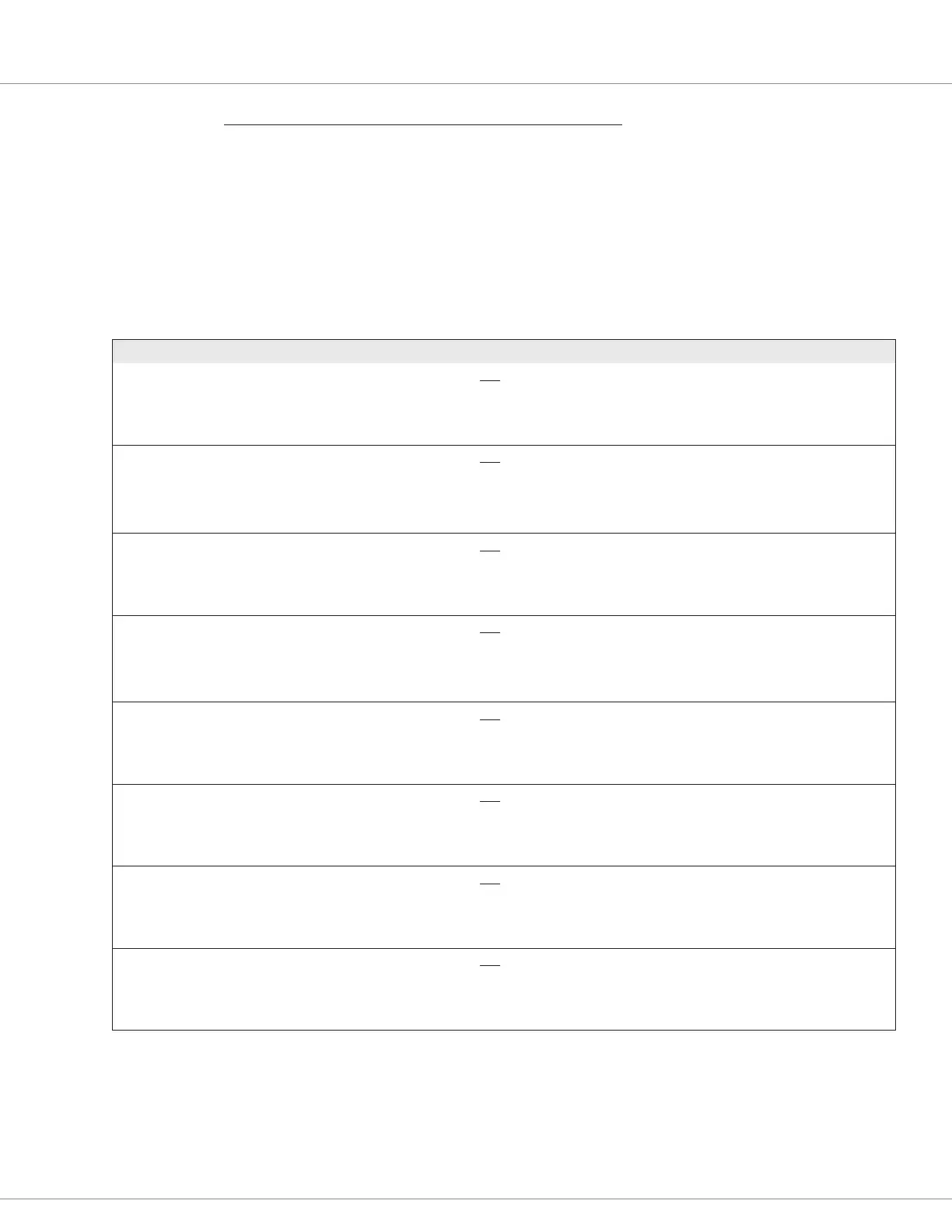
MOTOR SETUP/PMAC/PERMANENT MAGNET MOTOR – COMMISSIONING RESULTS MENU
Treat these parameters as READ ONLY commissioning RESULTS. The values are generated (automatically)
during PMAC commissioning. After successfully commissioning the motor, an OEM may copy these values
to another matching controller/system to duplicate the motor performance in another matching vehicle.
Hence these are writable parameters. Copy all values exactly as commissioned. This menu also applies to
the support for the Hall-effect position sensor feedback, which may only be used with PMSM (Permanent
Magnet Synchronous Motor) motors. Consult the FOS Release Notes for further details.
Contact Curtis before making any changes, or if there are any questions.
PARAMETER ALLOWABLE RANGE DEFAULT DESCRIPTION
Tuning Voltage
Tuning_Nominal_Pack_Volts
0x366B 0X00
Controller model basis
Auto generated by the
commissioning process
Used for copying
N/A
See the
RESULTS post
commissioning
The voltage when the current regualtor was tuned. This parameter
is used to scale the gains AND base speed. The Base Speed MUST
be tuned at the same voltage as the current regulator.
Phasing order
Phasing_Order
0x34EA 0x00
Controller model basis
Auto generated by the
commissioning process
Used for copying
N/A
See the
RESULTS post
commissioning
Inverts direction of feedback relative to control which can result
from phasing and encoder wiring swaps. Changing this parameter
in PMAC requires commissioning, do not set manually.
WARNING: Changing this parameter can cause uncommanded
motion. Care should be taken when changing this parameter.
Position Sensor Offset
PMAC_Position_Sensor_Offset
0x328E 0x00
Controller model basis
Auto generated by the
commissioning process
Used for copying
N/A
See the
RESULTS post
commissioning
The electrical offset to the position sensor for magnet alignment
in PMAC applications.
Position Sensor
Compensation
PMAC_Position_Sensor_
Compensation
0x328D 0x00
Controller model basis
Auto generated by the
commissioning process
Used for copying
N/A
See the
RESULTS post
commissioning
Compensation of position sensor.
Kp 1 Current
Kp_1_Current
0x3667 0x00
Controller model basis
Auto generated by the
commissioning process
Used for copying
N/A
See the
RESULTS post
commissioning
The current regulator proportional (Kp) gain for one axis.
Ki 1 Current
Ki_1_Current
0x3666 0x00
Controller model basis
Auto generated by the
commissioning process
Used for copying
N/A
See the
RESULTS post
commissioning
The current regulator integral (Ki) gain for one axis.
Kp 2 Current
Kp_2_Current
0x306A 0x00
Controller model basis
Auto generated by the
commissioning process
Used for copying
N/A
See the
RESULTS post
commissioning
The current regulator proportional (Kp) gain for one axis.
Ki 2 Current
Ki_2_Current
0x306B 0x00
Controller model basis
Auto generated by the
commissioning process
Used for copying
N/A
See the
RESULTS post
commissioning
The current regulator integral (Ki) gain for one axis.

 Loading...
Loading...







