Vers. 111422 30
Determining the joint type
Understanding the characteristics of your joint type is critical to maximize the precision of
the K-DUCER system, minimize the wear-and-tear on the tool, and minimize the assembly
cycle time for your application.
According to the ISO standard 205393:2017, the types of joints found in practice will fall in
between these two “extreme” definitions:
1. Soft, elastic, low torque-rate joint: after the fastener is seated, the tightening reaches
its target torque in more than one full revolution ( > 360°).
Examples: plastic screws; fasteners with split washers; self-threading fasteners.
2. Hard joint, inelastic joint, or high torque-rate joint: after the fastener is seated, the
tightening reaches its target torque in a fraction of a revolution ( < 30°).
Examples: metal screws on metal socket with simple washer.
Seating indicates the point at which the underside of the screw or bolt head touches the
socket, after the rundown phase.
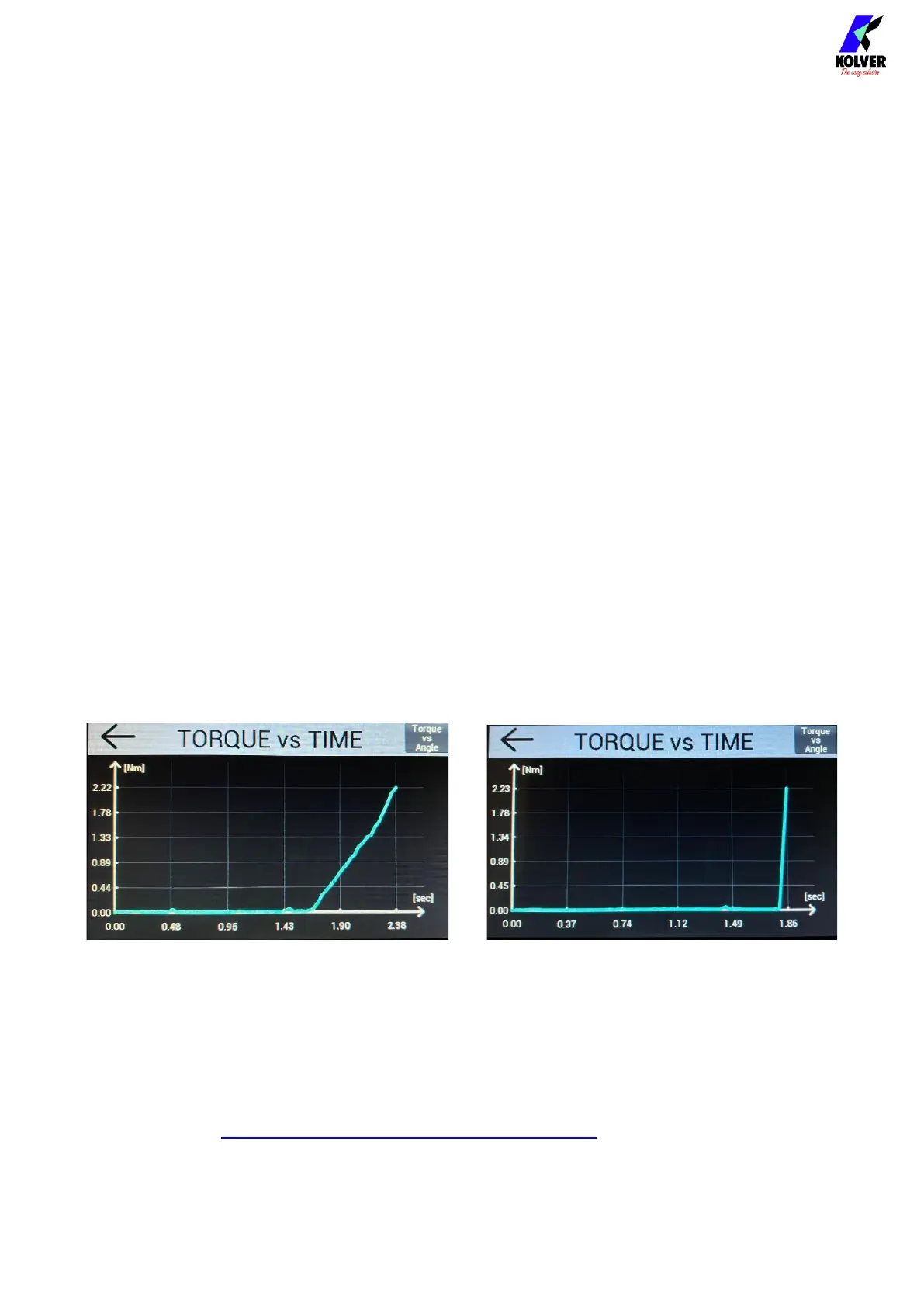
A simple approach to determine the joint type is to perform a tightening of your fastener
with the K-DUCER and observe the slope of the Torque vs Time graph.
A soft joint will show a moderate slope from the seating point to the final torque, while a
hard joint will show a very high slope (almost vertical).
Left picture: Torque vs Time graph for a soft joint, generated using a KDS-PL6/ESD on
Kolver joint simulator 240600.
Right picture: Torque vs Time graph for a hard joint, generated using a KDS-PL6/ESD on a
metal screw with non-locking washer on a threaded metal socket.
Also refer to the SELECTING THE APPROPRIATE SETTINGS section.
 Loading...
Loading...