Vers. 111422 77
utilizing the MODBUS TCP protocol for screwdriver control, program switching, and data
acquisition.
Changing program parameters such as target torque via MODBUS is possible, but it
shouldn’t be necessary except for the rare applications requiring more than 64 different
programs.
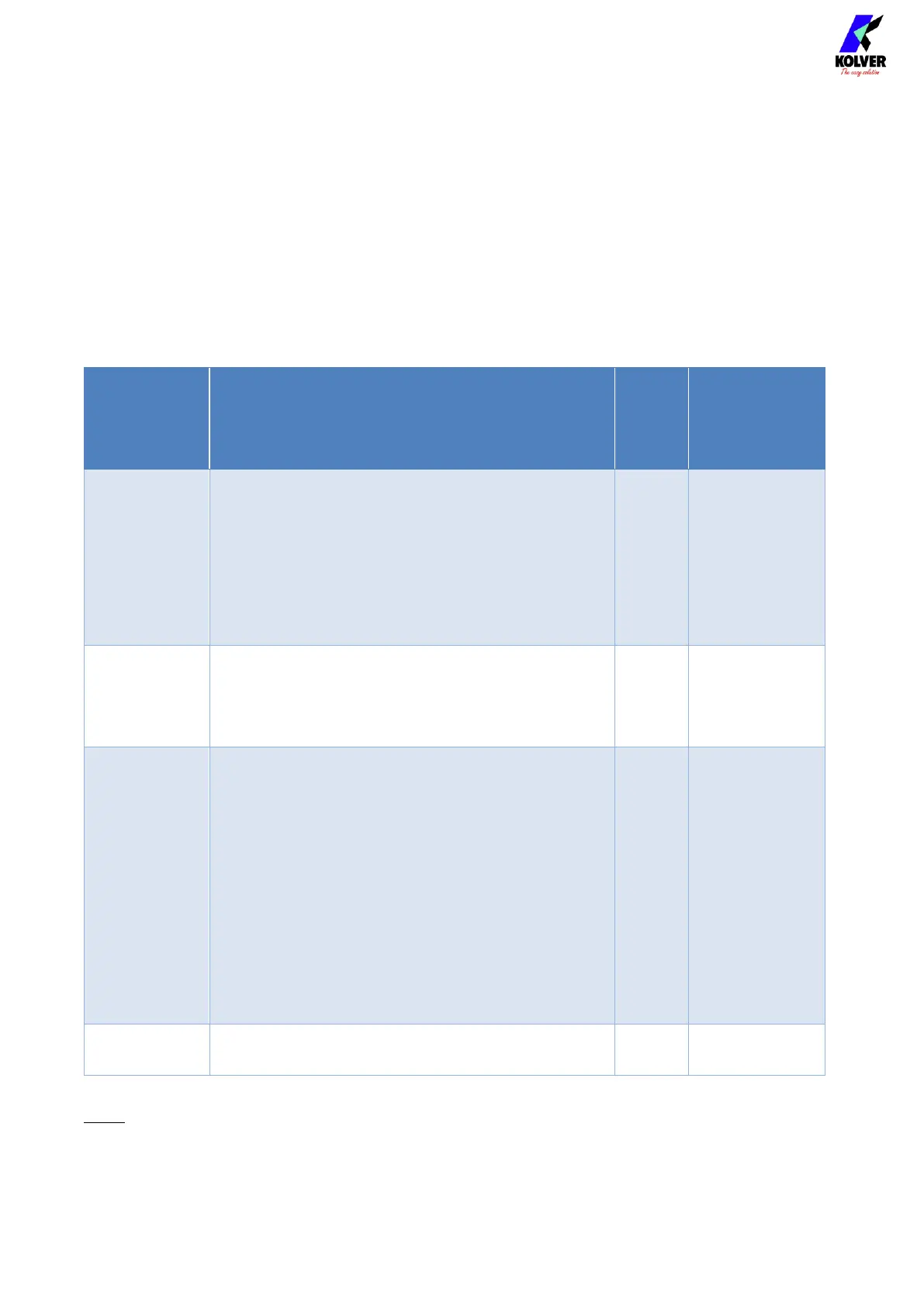
K-DUCER MODBUS map
The K-DUCER, MODBUS data is organized and accessed as follows:
Associated
MODBUS
function
codes
A mirror copy of the CN5 output pins
represented as bits;
Writeable coils mimicking the functionality of
CN5 input pins, providing screwdriver motor
control capability
01 (read coils)
05 (write
single coil)
15 (write
multiple coils)
Data related to the last screwdriving results
including closing torque and angle;
torque/angle charts; current screwdriving state
and errors; connected screwdriver info
04 (read input
registers)
HOLDING
REGISTERS
(bytes)
Current selected program;
Remote programming mode enter/exit flag;
All program settings;
All sequence setting;
Current selected sequence;
All options settings.
Barcode
03 (read
holding
registers)
06 (write
single
register)
16 (write
multiple
registers)
A mirror copy of the CN5 input pins
represented as bits
Note: the holding registers contain all program, sequence, and option settings. It is possible
but not recommended to change these parameters via MODBUS. Make sure to follow the
MODBUS map and to format all write data accordingly.
 Loading...
Loading...