DMA860H Fully Digital Stepper Drive Manual V1.0
8
Since pa
rallel and serial connections of motor coils will significantly change resulting inductance and resistance, it is
therefore important to set driver output current depending on motor phase current, motor leads and connection methods.
Phase current rating supplied by motor manufacturer is important in selecting driver current, however the selection also
depends on leads and connections.
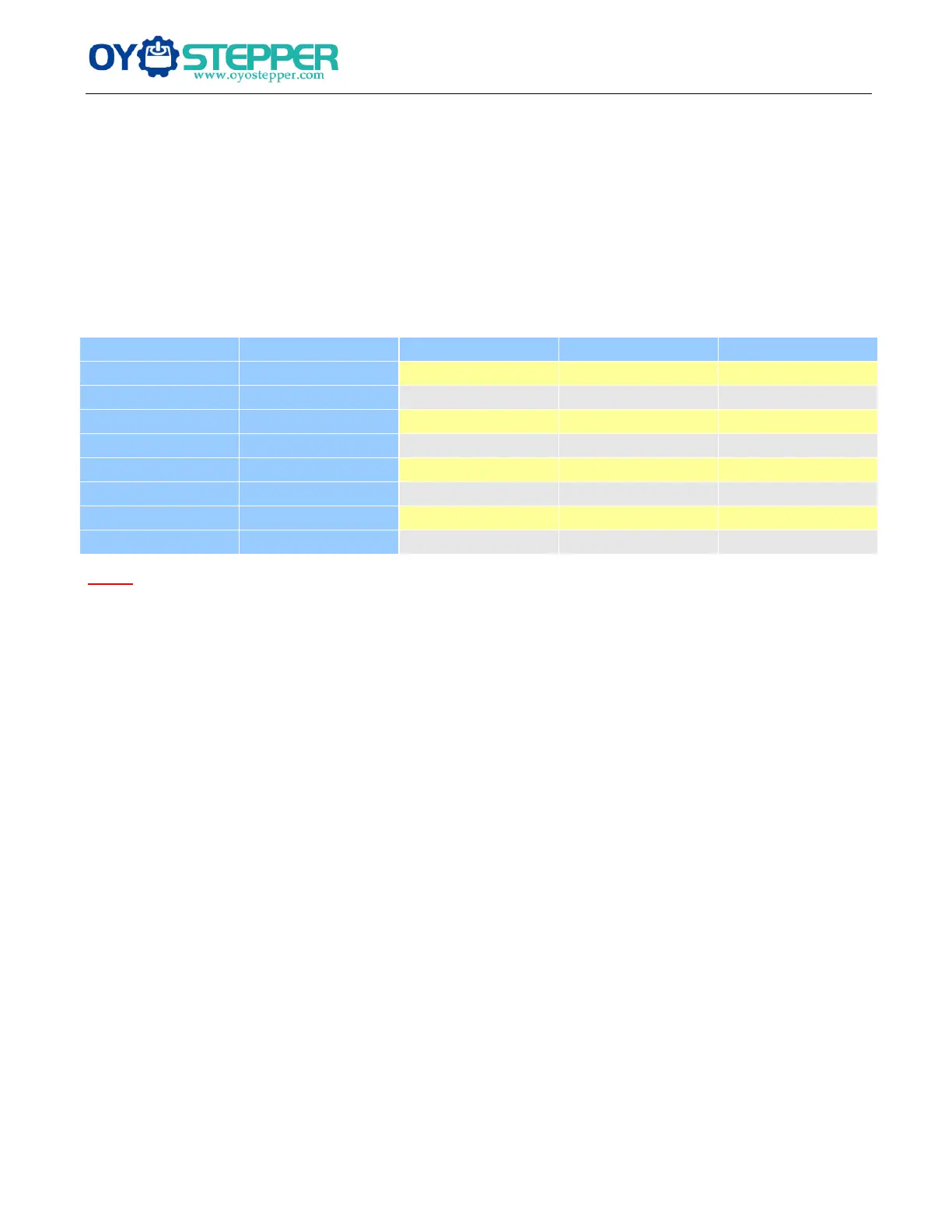
The first three bits (SW1, 2, 3) of the DIP switch are used to set the dynamic current. Select a setting closest to your
motor’s required current.
Dynamic Current Setting
REF Current
Peak Current
SW1 SW2 SW3
2.00A
ON ON ON
2.57A
3.08A
OFF ON ON
3.14A
ON OFF ON
3.71A
4.45A
OFF OFF ON
4.28A
ON ON OFF
4.86A
5.83A
OFF ON OFF
5.43A
ON OFF OFF
6.00A
7.20A
OFF OFF OFF
Notes: Due to motor inductance, the actual current in the coil may be smaller than the dynamic current setting,
particularly under high speed condition.
Standstill Current Setting
SW4 is used for this purpose. OFF meaning that the standstill current is set to be half of the selected dynamic current,
and ON meaning that standstill current is set to be the same as the selected dynamic current.
The current automatically reduced to 50% of the selected dynamic current one second after the last pulse. Theoretically,
this will reduce motor heating to 36% (due to P=I
2
*R) of the original value. If the application needs a different
standstill current, please contact Leadshine.
28BAuto Tuning by SW4
To get the optimized performance, switch SW4 two times in one second to identify the motor parameter after power-up
if it is the first time installation. The motor parameter is identified and the drive’s current loop parameters are
calculated automatically when SW4 is activated. The motor shaft will have a little vibration during auto-configuration.
If the user changes the motor or the power supply, don’t forget to toggle SW4 once again.