Page 29
Cars
Modern automobiles demonstrate another popular approach to locomotion. Cars have four wheels, two in front and two in back. The back wheels drive the robot (or car) forward and reverse,
while the front wheels are used for steering. Figure 2-9 shows how this looks.
Figure 2-9.
Car-style locomotion
Rear-wheel drive is simpler because it decouples the drive mechanism from the steering mechanism. But you could obviously build front-wheel drive robots, with enough parts. Whichever system
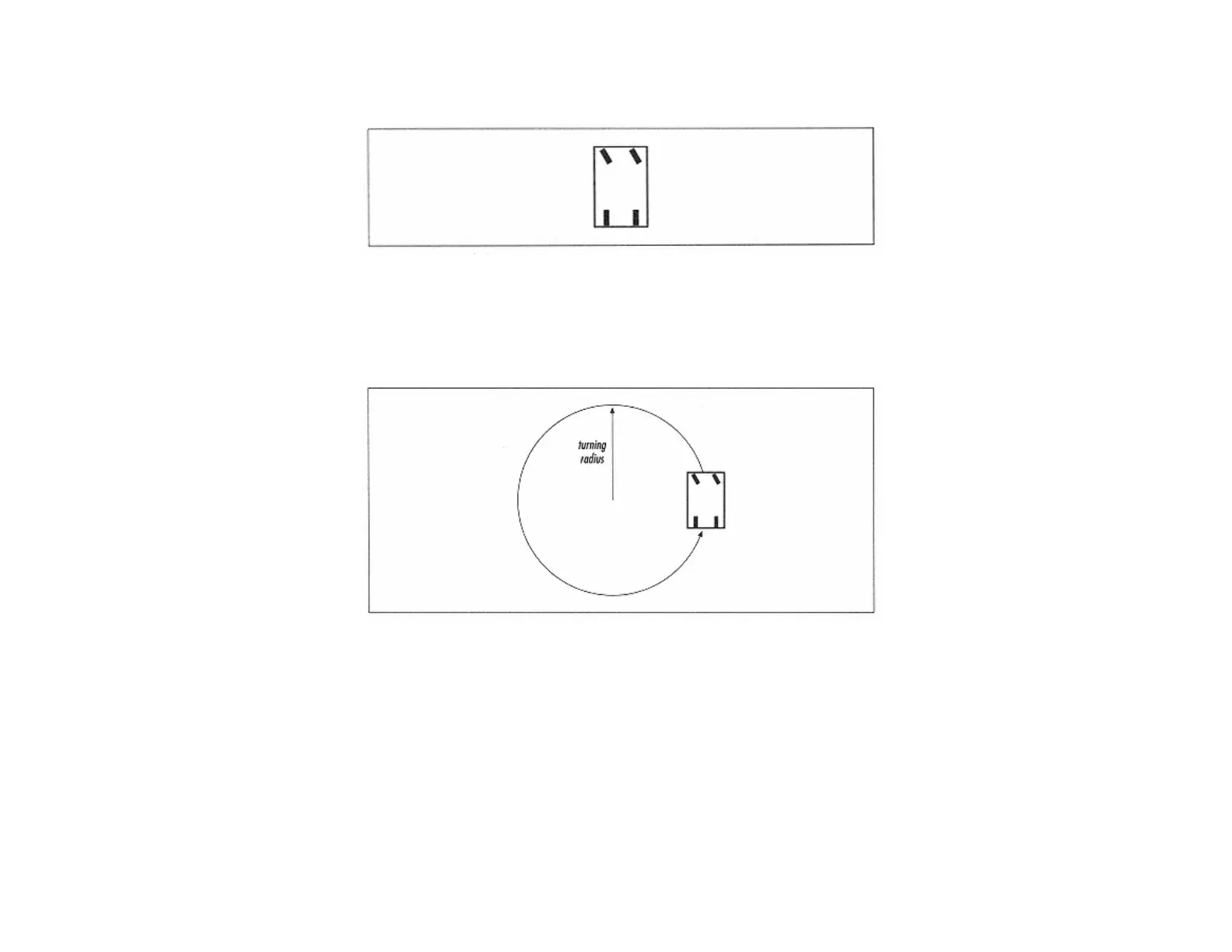
you choose, this design does not have a zero turning radius. (You can't spin in place in your car.) The term turning radius comes from what happens when a car-style robot drives in circles, as
shown in Figure 2-10.
Figure 2-10.
Turning radius of a car
This type of design can be difficult to maneuver, as you'll know if you've ever tried to parallel park a car. The other subtlety of this design involves the back drive wheels. When the car turns, the
back wheels must turn at different speeds. Consider Figure 2-10 again—the inside back wheel has a smaller distance to go than the outside wheel.