Page 30
This means that you can't simply connect the two drive wheels with a shaft and hook it up to a motor. You need something trickier, called a differential (not the same as differential drive).
A simple variation on the car design is the tricycle design. In this design, a single wheel, instead of a pair, is used for steering.
Exotic Drives
There are three other interesting drives that should be mentioned. The first of these is synchro drive. In this scheme, the robot has three or more identical wheels. Each of the wheels pivots on its
vertical center. All of the wheels point in the same direction. as shown in Figure 2-11.
Figure 2-11.
Synchro drive
To turn, the robot swivels the wheels to point in a new direction. This has the interesting side effect that the robot can change direction even though its body stays oriented the same. This property
could be useful for robots that need to communicate with the computer over the IR link. The key to building synchro drive robots is a piece called a large turntable. You can order these pieces
from Pitsco LEGO DACTA; see Appendix A, Finding Parts and Programming Environments, for details.
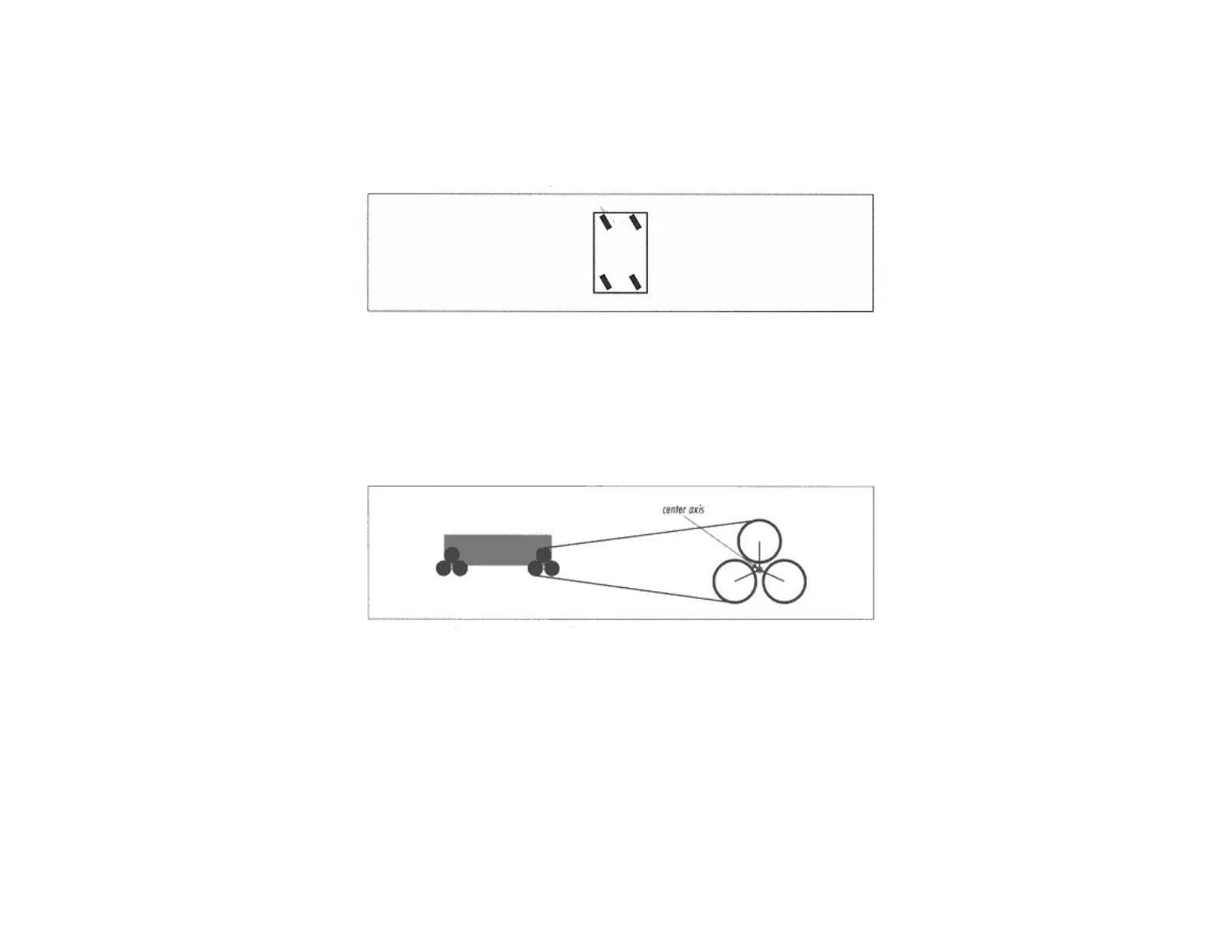
The tri-star wheel is another interesting idea. Figure 2-12 shows a side view of a tri-star robot and a close-up of the wheel assembly.
Figure 2-12.
Side view of the tri-star design
Page 31
Each wheel assembly is actually composed of three wheels arranged in a triangular fashion. The robot drives these wheels to move. When a large obstacle (like a step) is encountered, the entire
wheel assembly rolls on its center axis. In essence, the entire wheel assembly acts like a large triangular wheel. This large wheel size enables the tri-star design to drive over large obstacles.
Killough's platform is an interesting variation on the wheels-within-a-wheel concept. It's really too exotic to describe here; the "Online Resources" lists two web pages that contain photographs and
diagrams of this platform.
Bumpers and Feelers
Hank uses the touch sensors to figure out when he bumps into something. But it's not really enough to put a touch sensor just on the front of your robot, because then it could be activated only in
one specific spot. Instead, Hank uses a pair of bumpers to detect touches across the entire front of the robot.
The idea of a bumper is to make a large area sensitive to touch so that the robot can detect collisions with a wide variety of objects—chair legs, walls, pets, rocks, trees, and so forth.