36
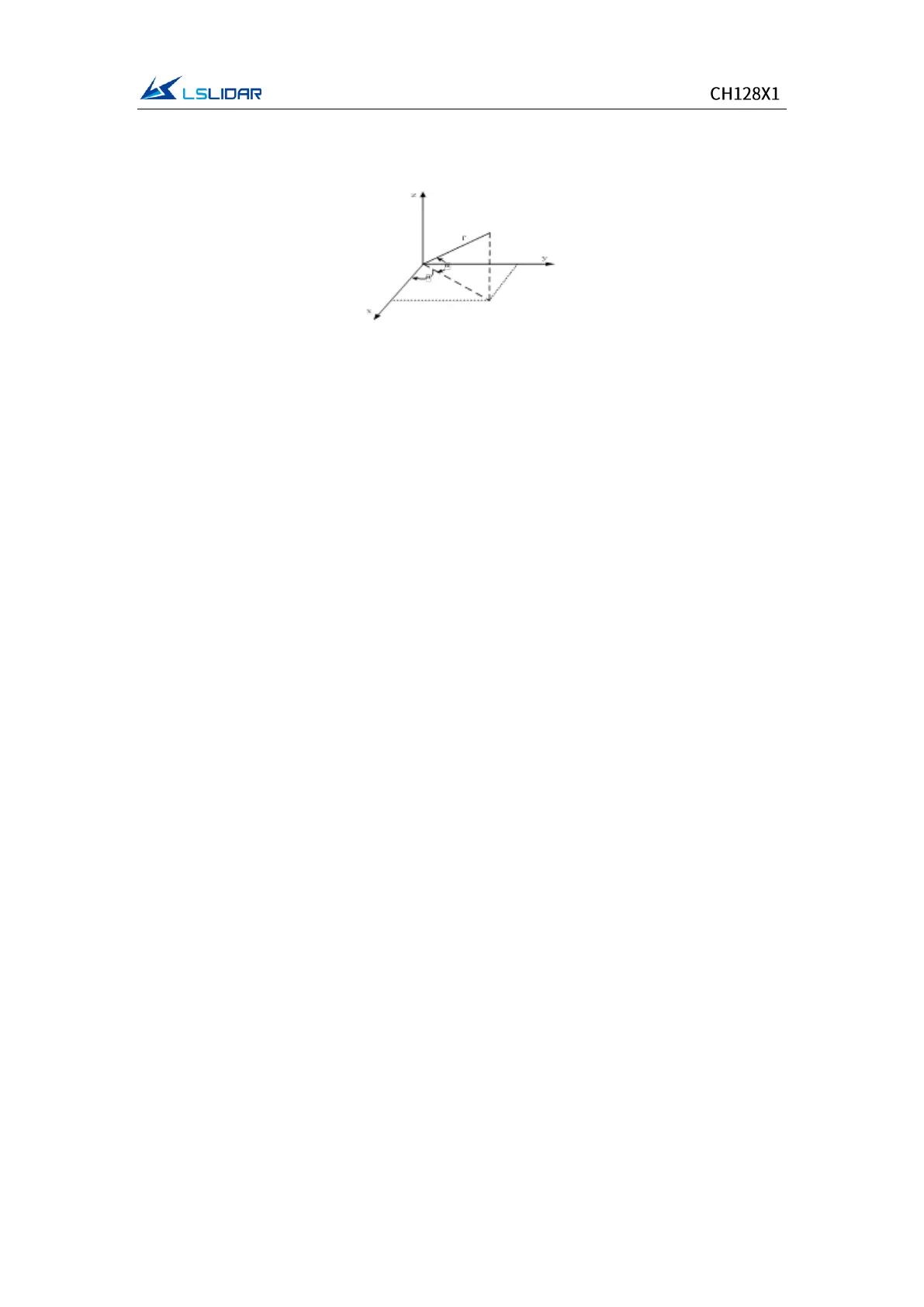
projected onto the x, y, and z axes.
Figure 7.2 Coordinate Mapping
8. Accurate Time Calculation
To accurately calculate the time of the point cloud data, it is necessary to obtain
the timestamp of the data packet and the UTC time of the device package output
by the Lidar. The timestamp and UTC time come from the same synchronization
source, such as a GPS.
The laser emission interval of the CH128X1 Lidar is about 0.868μs, and the
measurement interval of adjacent points is 0.868 μs.
8.1 Single Echo Mode
In the single echo mode, a data packet has a total of 171 measurement data. The
packaging time of the data packet is about 0.868 μs*171~=148.428 μs, and the
data rate is about 1s/148.428 μs ~=6737 data packets/second.
8.1.1 Calculation of Data Packet End Time
The timestamp in the data packet is a relative time in microseconds, which is
defined as the packing time of the laser measurement data of the last channel in
the data packet (packet end time), and its duration is less than 1 second.
Therefore, to calculate the absolute end time of the data packet, it is necessary
to obtain the 3-byte hour, minute and second information and the 4-byte
microsecond timestamp from the data packet first, and then obtain the year,
month and day information of the UTC time from the device package. The
combination of the three will be the exact time when the data packet ends.
8.1.2 Accurate Time Calculation of Channel Data
The precise measurement time of each data can be calculated with the exact
time of the end of the data packet and the light-emitting time interval of the 171
data.

 Loading...
Loading...