1.3.4 Encoder signals output interfaces
z
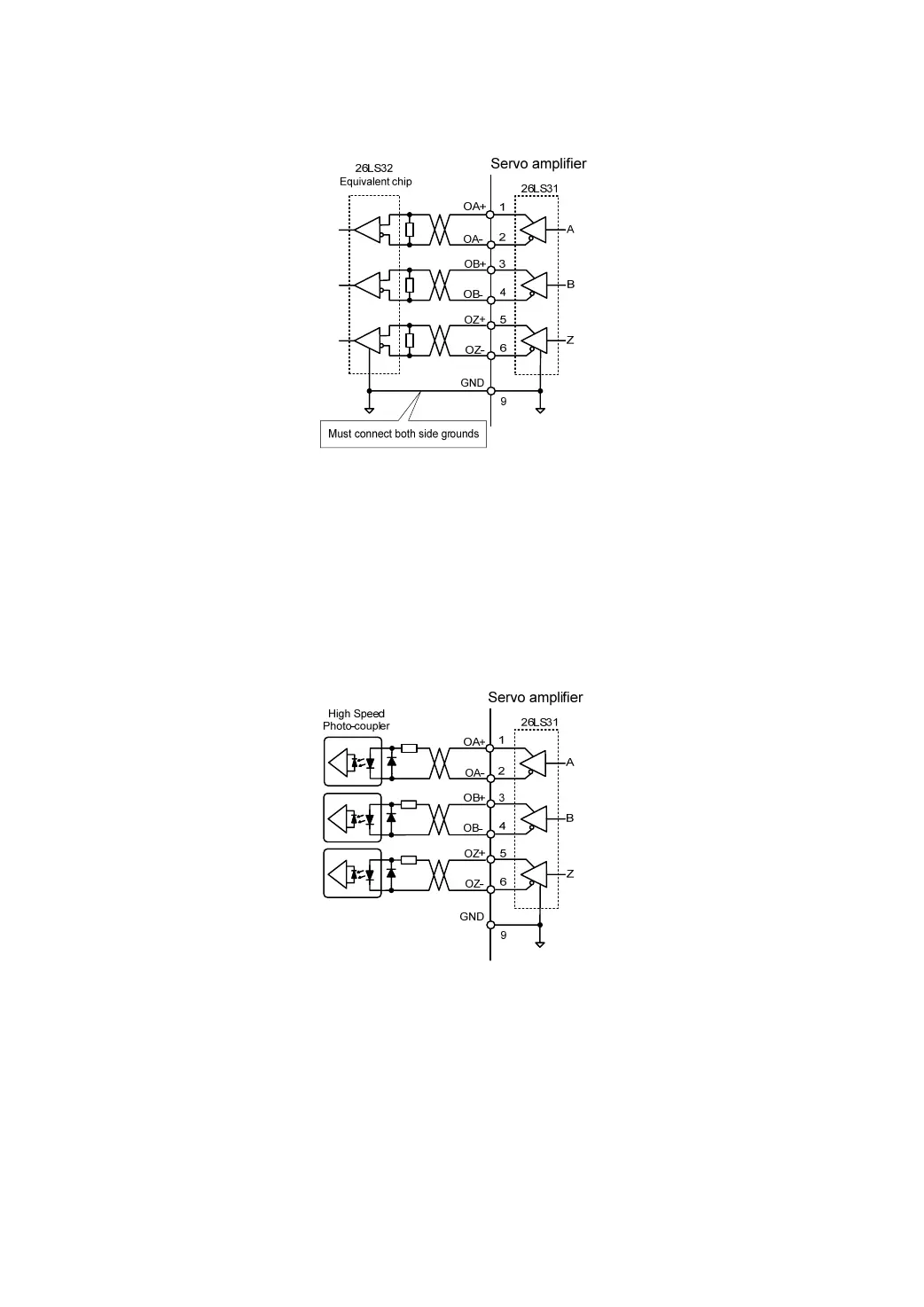
The encoder signals is transferred through the differential driver (e.g AM26LS31).
z On the host controller uses AM26LS32(or equivalent) to make the receiver, must connect the
terminal resistance, the value is about 330Ω;
z Encoder signal (GND) of servo driver must connect with the ground terminal on host
controller.
z
No isolation output.
z
The high-speed photo coupler (e.g. 6N137) can also be used on the host controller to make the
receiver.
7