8Perform Sequencer Direct
How to Operate Sequencer Direct 2-90
(2) Mapping hand signal with parameter HANDTYPE
When the parameter HANDTYPE setting is changed, robot hand signal corresponding to the hand output
control signal may change. The signals allocated to hand signals correspond to the hand output control sig-
nals in order.
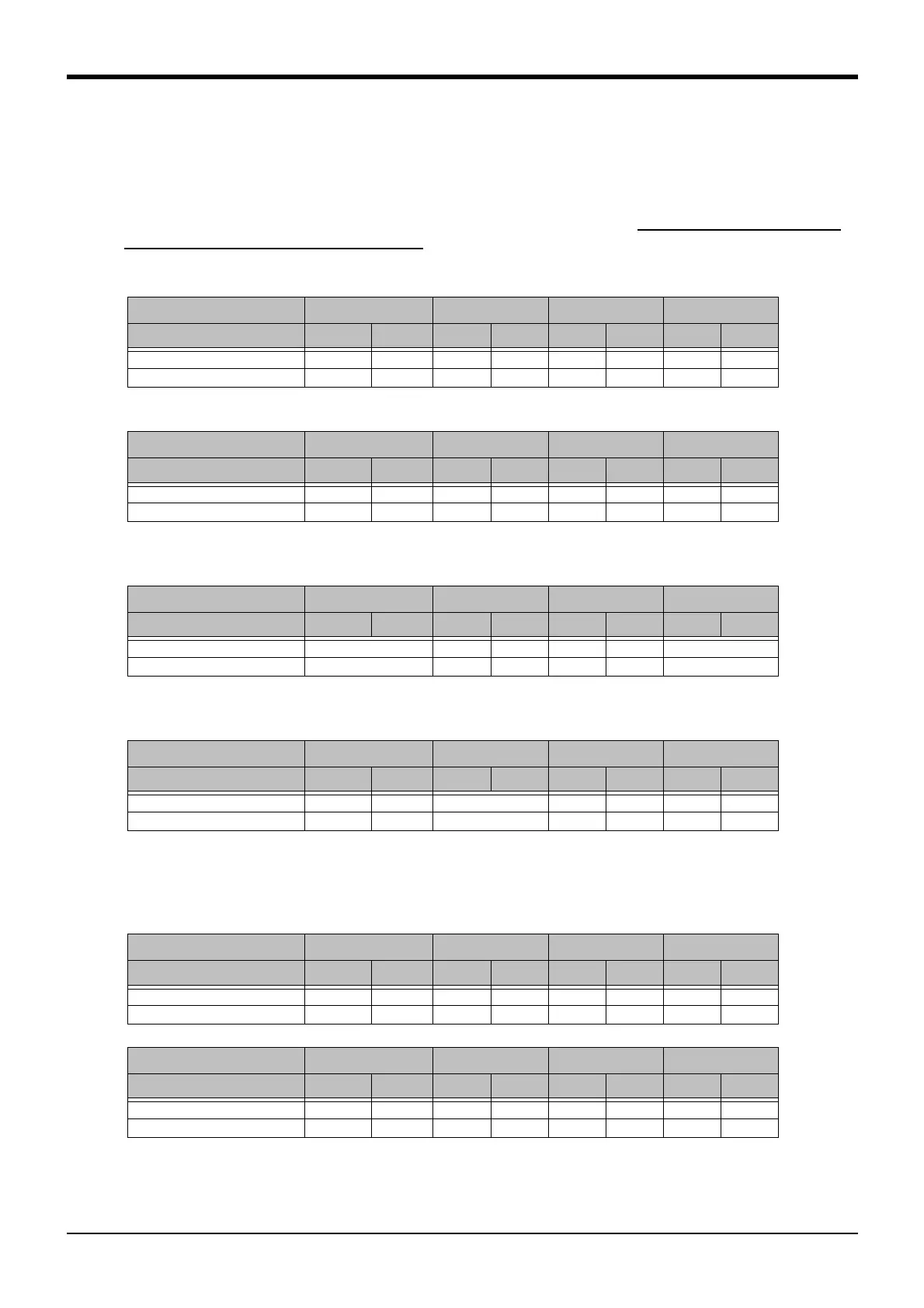
● The tables below list the correspondence to the robot hand output signals, when hand output control sig-
nals (HANDOUT) are set to "10080, 10087":
a) Parameter HANDTYPE=D900,D902,D904,D906, , , , (factory defaults):
b) Parameter HANDTYPE=D10,D12, , , , , ,:
The areas 10084 - 10087 are not used.
c) Parameter HANDTYPE=S10, , ,S13, , , , :
The areas 10082 - 10087 are not used.
d) Parameter HANDTYPE=D10,S12, , , , , ,:
The areas 10083 - 10087 are not used.
● It also supports hands 5 - 8 of parameter HANDTYPE.
When parameter HANDTYPE=D900, D902, D904, D906, D10, D12, D14, D16,
hand output control signal (HANDOUT) are set to "10080, 10095":
Hand No 1 2 3 4
Open/Close Open Close Open Close Open Close Open Close
Robot hand output sig 900 901 902 903 904 905 906 907
Hand output cont sig 10080 10081 10082 10083 10084 10085 10086 10087
Hand No 1 2 3 4
Open/Close Open Close Open Close Open Close Open Close
Robot hand output sig 10 11 12 13 - - - -
Hand output cont sig 10080 10081 10082 10083 - - - -
Hand No 1 2 3 4
Open/Close Open Close Open Close Open Close Open Close
Robot hand output sig 10 - - - - 13
Hand output cont sig 10080 - - - - 10081
Hand No 1 2 3 4
Open/Close Open Close Open Close Open Close Open Close
Robot hand output sig 10 11 12 - - - -
Hand output cont sig 10080 10081 10082 - - - -
Hand No 1 2 3 4
Open/Close Open Close Open Close Open Close Open Close
Robot hand output sig 900 901 902 903 904 905 906 907
Hand output cont sig 10080 10081 10082 10083 10084 10085 10086 10087
Hand No 5 6 7 8
Open/Close Open Close Open Close Open Close Open Close
Robot hand output sig 10 11 12 13 14 15 16 17
Hand output cont sig 10088 10089 10090 10091 10092 10093 10094 10095
 Loading...
Loading...



