4MELFA-BASIC V
Detailed explanation of Robot Status Variable 4-365
(4) M_SplVar returns the value according to the states shown in Table 4-33.
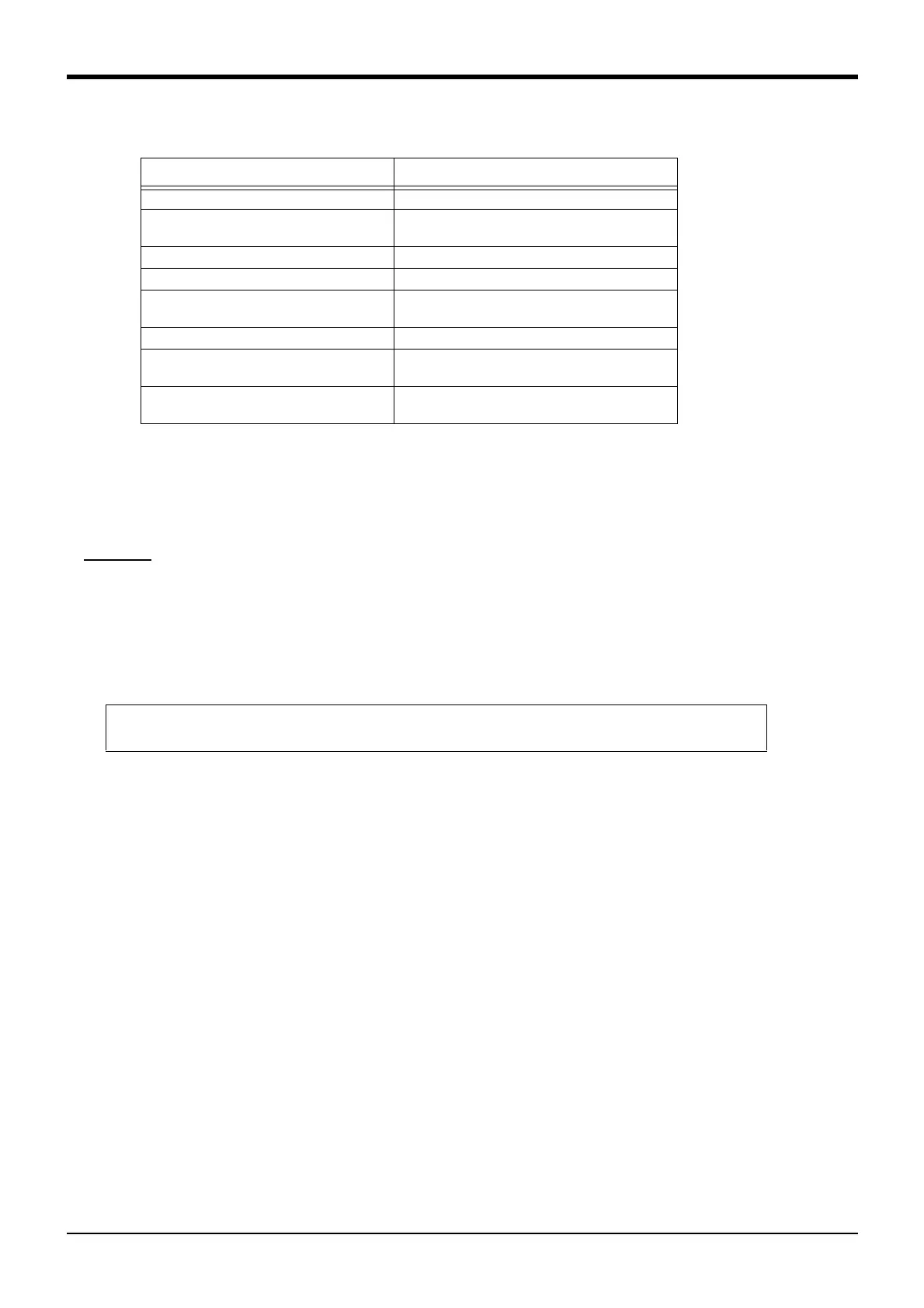
Table 4-33: Value returned by M_SplVar
(5) A random value between 0 and 32767 can be set by writing to M_SplVar. That value is held until the
value is changed with spline interpolation or other operations/processes.
M_Svo
[Function]
Returns the current status of the servo power supply.
1: Servo power ON
0: Servo power OFF
[Format]
[Terminology]
<Numeric Variable> Specifies the numerical variable to assign.
<Mechanism Number> Enter the mechanism number. 1 to 3, If the argument is omitted, 1 is set as the
default value.
[Reference Program]
1 M1=M_Svo(1) ' M1 will contain the current status of the servo power supply.
[Explanation]
(1) The status of the robot's servo can be checked.
(2) This variable only reads the data.
Status Value returned by M_SplVar
Immediately after power ON 0
During spline interpolation execution Value corresponding to progress of spline inter-
polation (Value set in spline file)
When passing through path point set to "–1" Value at that time is continuously applied
After spline interpolation Value at end of spline interpolation
Immediately after main program’s END
command is executed
0
Immediately after program reset operation 0
Immediately after value is read into
M_SplVar
Written value
Mechanism not compatible with spline inter-
polation
0 (0 even after write is executed)
Example)<Numeric Variable>=M_Svo [(<Mechanism Number>)]
 Loading...
Loading...



