SENSORS
FOUR-WHEEL ANTI-LOCK BRAKE SYSTEM (4ABS)
35B-7
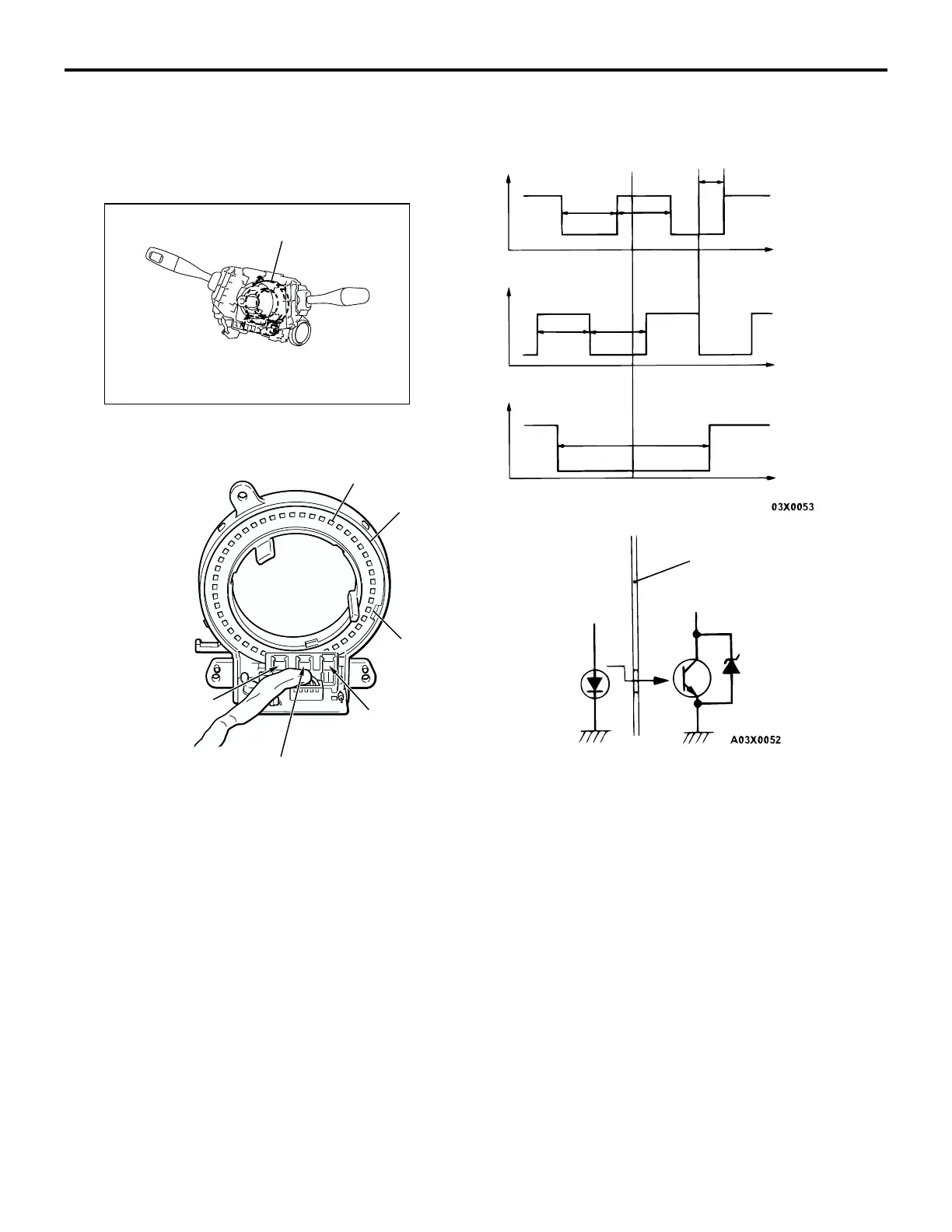
STEERING ANGULAR VELOCITY SENSOR
The steering angular velocity sensor is installed at
the steering column, and is used to output steer
angles to the ABS-ECU as signals. It is composed of
the slit plate which rotates according to the move-
ments of the steering wheel and a three-set photoint-
erruptor. The slit plate and photointerruptors have a
sealed integrated structure to prevent the invasion of
foreign particles as well as misoperations by external
light. To detect malfunctions of the sensor output cir-
cuit, it is equipped with a zener diode for detecting
disconnections parallel to the photo-transistor. The
ABS-ECU calculates the steering angle by reading
the signals of the steering angular velocity sensor
after every certain period of time and calculating the
total of the ST-1 signal and ST-2 signal. The steering
angle is obtained by taking the neutral position (ST-N
output is L center) as 0 degree angle, and if there are
changes, the steering angle is added with 2 degree
angle for right and -2 degree angle for left. The out-
put of the photointerruptor becomes L (low) when
light passes through and H (high) when obstructed.
10091AU
Y2057AU
AC211551
AB
OUTPUT WAVEFORM OF EACH PHOTOINTERRUPTOR
LIGHT-EMITTING
DIODE
PHOTO-TRANSISTOR
ST-1
ZENER DIODE (FOR
DISCONNECTION
DETECTION)
4˚ 4˚4˚ 4˚
4˚ 4˚
2˚
H
L
H
L
H
L
H
L
H
L
STEERING ANGULAR
VELOCITY SENSOR
SLIT
SLIT PLATE
SLIT PLATE
NEUTRAL POSITION
DETECTION SLIT
PHOTOINTERRUPTOR
(ST-2)
PHOTOINTERRUPTOR
(ST-1)
PHOTOINTERRUPTOR
(ST-N)
V
ST-2
V
ST-N
V
θ
θθ
θ
11˚