5 - 42
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
Setting value, setting range
Setting value buffer memory
address
Item
Value set with peripheral device
Value set with sequence
program
Default
value
Axis 1 Axis 2 Axis 3 Axis 4
Pr.40
Positioning Complete signal
output time
0 to 65535 (ms)
0 to 65535 (ms)
0 to 32767 :
Set as a decimal
32768 to 65535:
Convert into hexadecimal
and set
300 59 209 359 509
Pr.41
Allowable circular
interpolation error width
The setting value range differs depending on the
Pr.1
Unit
setting.
Here, the value within the [Table 1] range is set.
[Table 1] on right page
100
60
61
210
211
360
361
510
511
0: External positioning start 0
1: External speed change
request
1
2: Speed-position, position-
speed switching request
2
Pr.42
External command function
selection
3: Skip request 3
0 62 212 362 512
Pr.201
Restart allowable range
when servo OFF to ON
0, 1 to 163840 [PLS]
0: restart not allowed
0
64
65
214
215
364
365
514
515
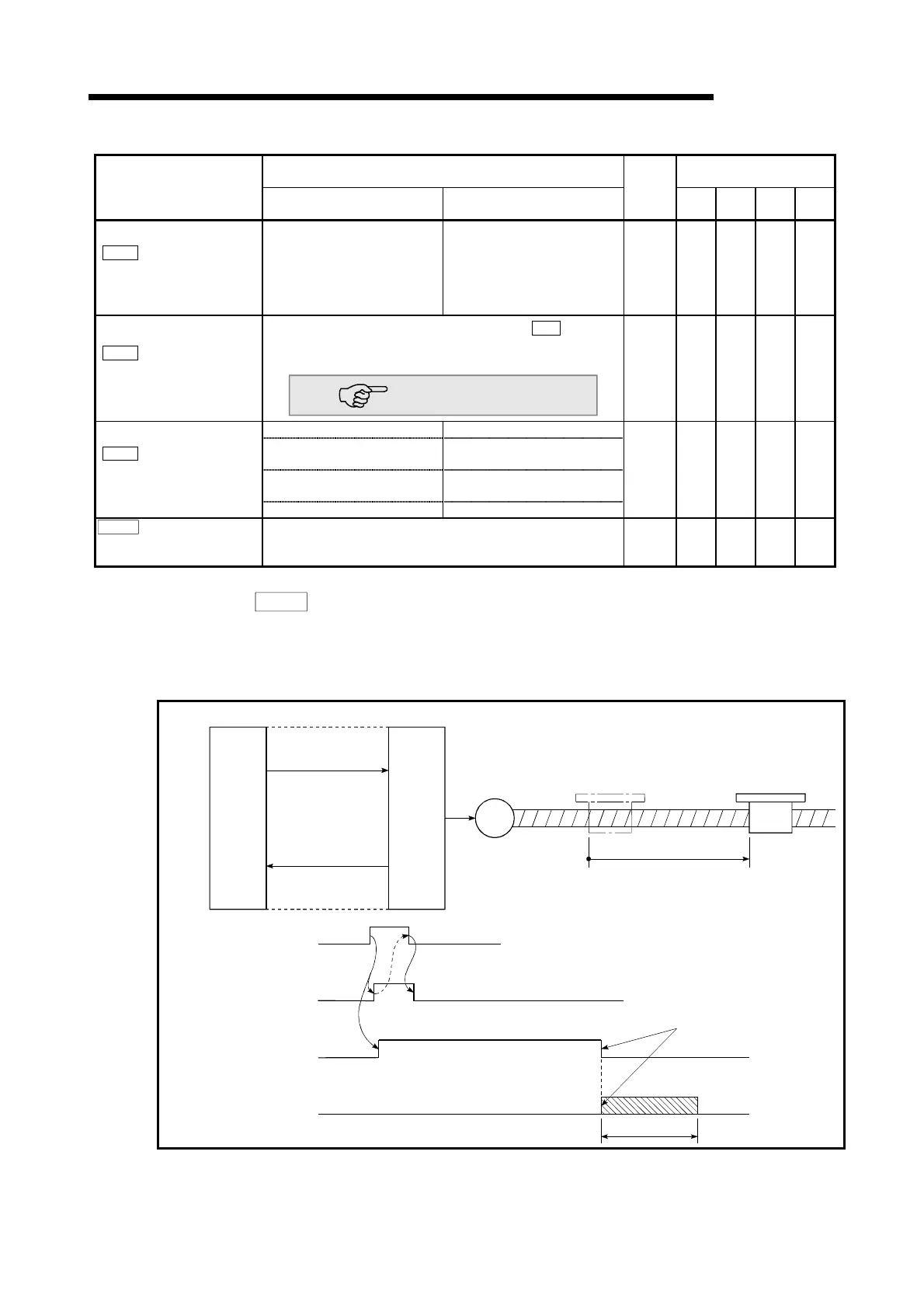
Pr.40 Positioning Complete signal output time
Set the output time of the positioning complete signal [X14, X15, X16, X17] output
from the QD75.
A positioning completes when the specified dwell time has passed after the QD75
had terminated the output.
M
QD75
[Y10, Y11, Y12, Y13]
PLC
PLC CPU
Positining Start signal
Positioning
complete signal
[X14, X15, X16, X17]
Positioning
Positioning start signal
Start complete signal
BUSY signal
Positioning complete signal
Positioning complete signal
(after dwell time has passed)
Output time
[Y10, Y11,Y12,Y13]
[X10, X11, X12, X13]
[XC, XD, XE, XF]
[X14, X15, X16, X17]
Positioning complete signal output time

 Loading...
Loading...