5 - 49
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
4 : Count method 1)
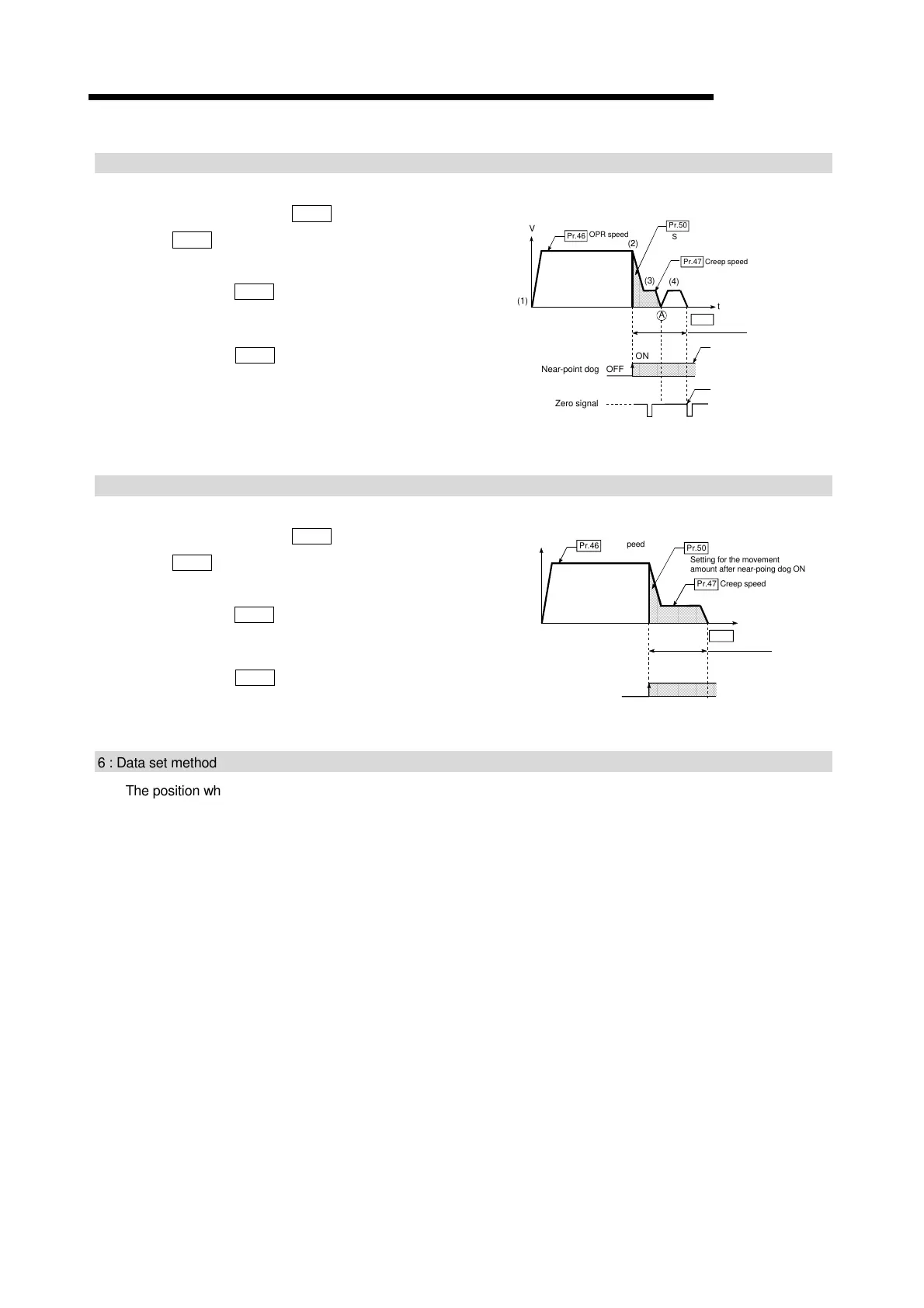
(1) Start OPR.
(Start movement at the
Pr.46
OPR speed in
the
Pr.44
OPR direction.)
(2) Detect the near-point dog ON, and start deceleration.
(3) Decelerate to
Pr.47
Creep speed, and move with the
creep speed.
(4) After the near-point dog turns ON and the movement
amount set in
Pr.50
"Setting for the movement amount
after near-point dog ON" has passed, the QD75 stops with
the first zero, and the OPR is completed.
Note) After the servo amplifier has been turned on, the zero
point of the encoder must be passed at least once before
point A is reached.
A
t
V
ON
(4)
(3)
(2)
(1)
Near-point dog OFF
Zero signal
OPR speed
Pr.46
Pr.47 Creep speed
Pr.50
Setting for the movement
amount after near-poing dog ON
First zero signal after moving the
movement amount after near-
point dog ON
Movement amount after
near-point dog ON
Md.34
The near-point dog must turn OFF
at a sufficient distance away from
the OP position.
5 : Count method 2)
(1) Start OPR.
(Start movement at the
Pr.46
OPR speed in
the
Pr.44
OPR direction.)
(2) Detect the near-point dog ON, and start deceleration.
(3) Decelerate to
Pr.47
Creep speed, and move with the
creep speed.
(4) After the near-point dog turns ON and the movement
amount set in
Pr.50
“Setting for the movement amount
after near-point dog ON” has passed, OPR is completed.
t
V
ON
(1)
(2)
(3)
(4)
Near-point dog OFF
Movement amount after
near-point dog ON
Md.34
OPR speed
Pr.46
Pr.47 Creep speed
Pr.50
Setting for the movement
amount after near-poing dog ON
6 : Data set method
The position where the OPR has been made will be the OP.
(Perform after the servo amplifier has been turned ON and the servomotor has been rotated at least once using the
JOG or similar operation.)

 Loading...
Loading...