12 - 55
MELSEC-Q
12 CONTROL SUB FUNCTIONS
[2] OPR
The absolute position system can establish the location of the OPR, using "Data
set method", "Near-point dog" and "Count method" OPR method.
In the "Data set method" OPR method, the location to which the location of the
OPR position is moved by manual operation (JOG operation/manual pulse
generator operation) is treated as the OPR position.
The stop position during
OPR execution is stored as the OPR position.
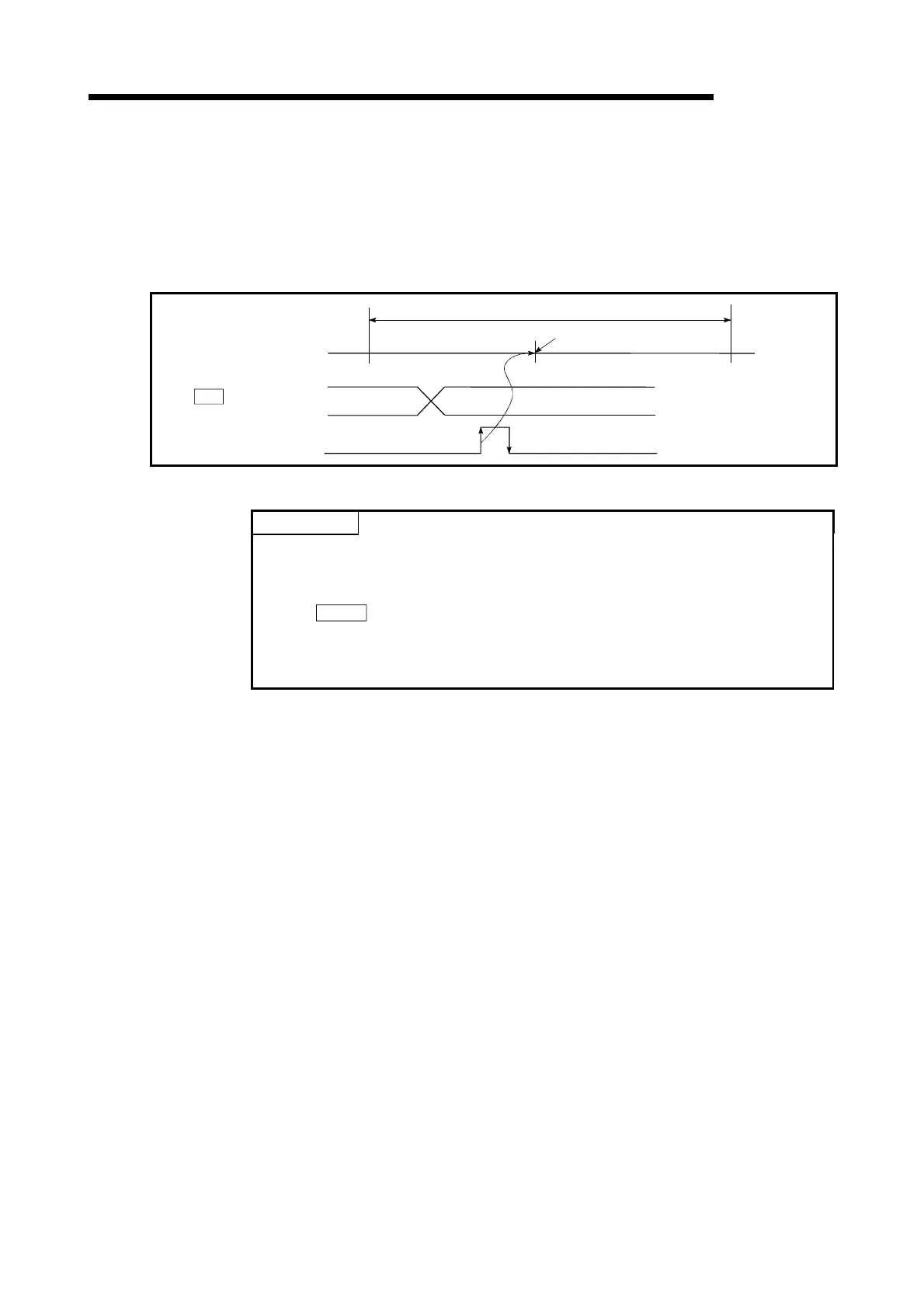
9001 (OPR destignation)
Cd.3 Positioning
start No.
Positioning start
(Y10 to Y13)
Movement range for the machine
Moved to this position by
manual operation.
Fig. 12.33 Operation of the OPR execution
POINT
The OPR must be made after the servomotor has been rotated more than one
revolution using JOG or positioning operation. If OPR is not rotated more than one
revolution, error [210] (OPR restart zero point not passed) occurs.
When "
Pr.133
OPR set condition selection" of the MR-J2S-B or MR-J2M-B is set
"1", OPR can be carried out even if the servomotor are not routed more than one
revolution. (The "OP address" is the current value at the power supply is turned
ON.)

 Loading...
Loading...