15 - 65
MELSEC-Q
15 TROUBLESHOOTING
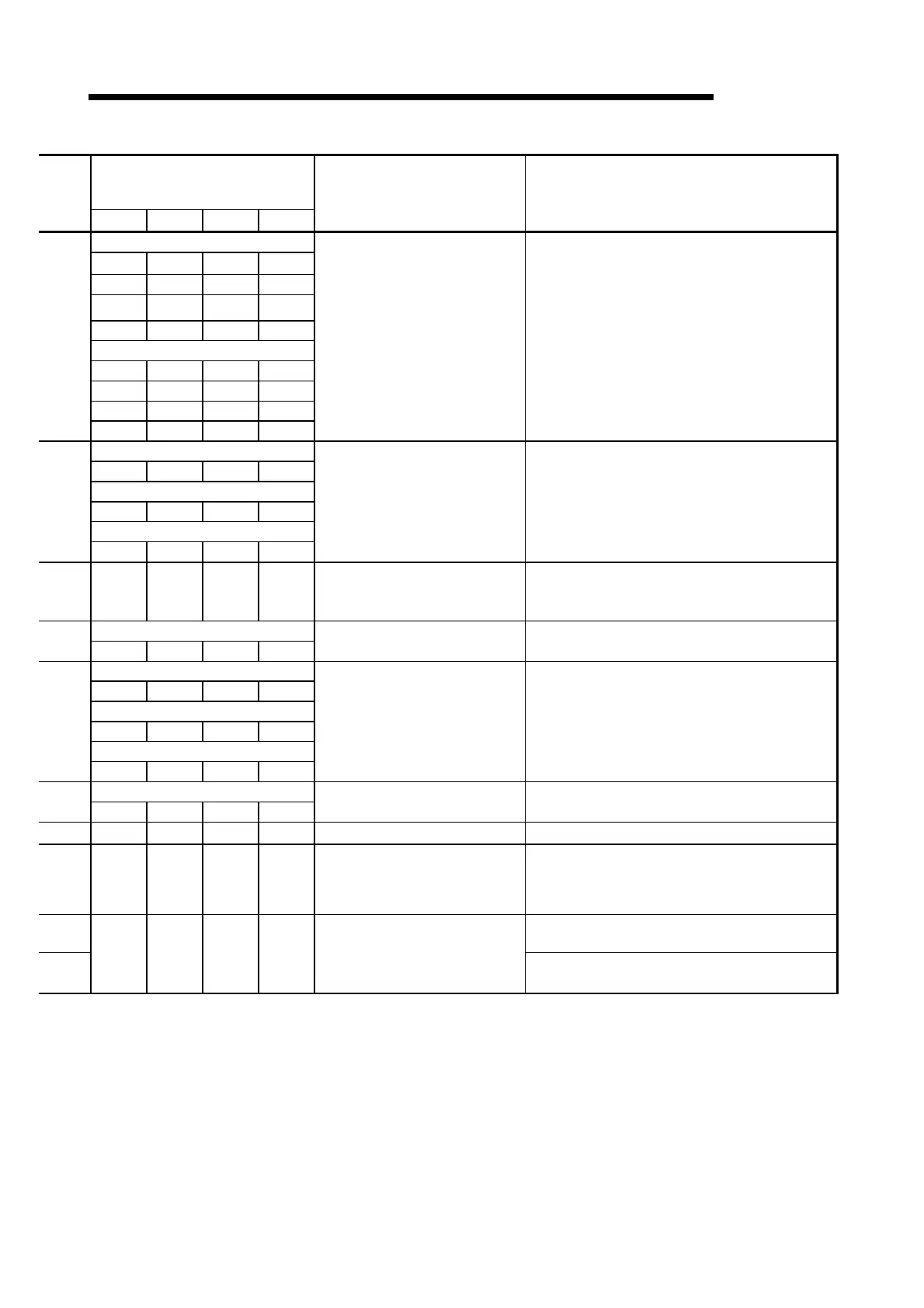
Related buffer memory address
Axis 1 Axis 2 Axis 3 Axis 4
Check point Corrective action
Acceleration time
12, 13 162, 163 312, 313 482, 483
36, 37 186, 187 336, 337 486, 487
38, 39 188, 189 338, 339 488, 489
40, 41 190, 191 340, 341 490, 491
Deceleration time
14, 15 164, 165 314, 315 464, 465
42, 43 192, 193 342, 343 492, 493
44, 45 194, 195 344, 345 494, 495
46, 47 196, 197 346, 347 496, 497
Increase the acceleration/deceleration time
constant.
Torque limit value
26 176 326 476
OPR torque limit value
86 236 386 536
Torque output setting value
1552 1652 1752 1852
Increase the torque limit value.
— — — —
• Review the power supply capacity.
• Use servomotor which provides larger output.
Positioning gain 1
30113 30213 30313 30413
Increase set value and adjust to ensure proper
operation.
Torque limit value
26 176 326 476
OPR torque limit value
86 236 386 536
Torque output setting value
1552 1652 1752 1852
• When torque is limited, increase the limit value.
• Reduce load.
• Use servomotor that provides larger output.
Input signal logic selection
31 181 331 481
• Review operation pattern.
• Install limit switches.
— — — —
Change the servomotor.
— — — —
Connect correctly.
Repair or change the cable.
— — — —
Change the communication devices (e.g. personal
computer).

 Loading...
Loading...