5 - 8
MELSEC-Q
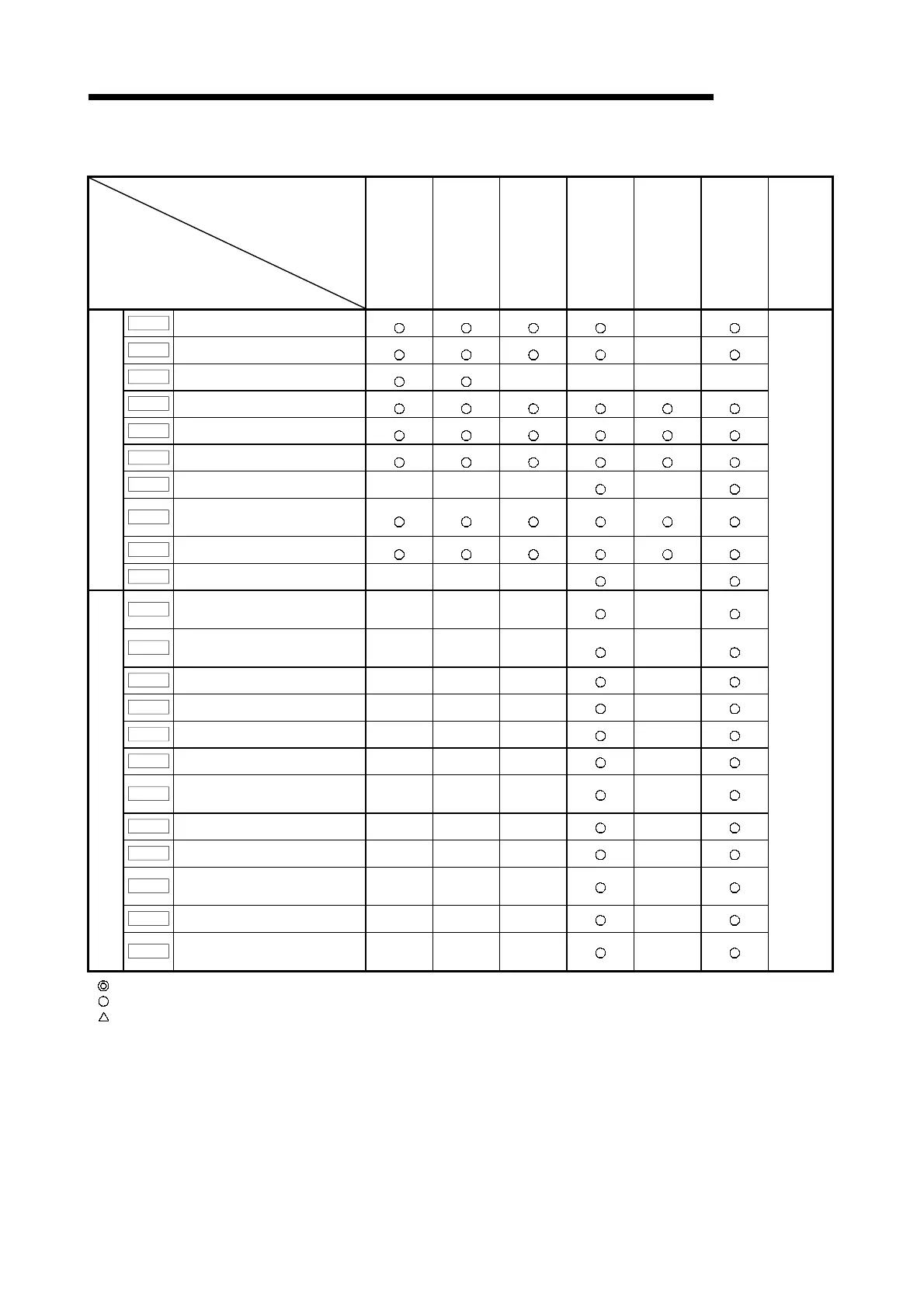
5 DATA USED FOR POSITIONING CONTROL
Servo amplifier
Servo parameters
MR-H-BN MR-H-BN4 MR-J2-B MR-J2S-B MR-J2-Jr MR-J2M-B Remark
Pr.127
Monitor output 1 offset
–
Pr.128
Monitor output 2 offset
–
Pr.129
Pre-alarm data selection
– – – –
Pr.130
Zero speed
Pr.131
Error excessive alarm level
Pr.132
Optional function 5
Pr.133
Optional function 6 – – –
–
Pr.134
PI-PID control switch-over position
droop
Pr.136
Speed differential compensation
Servo expansion parameters
Pr.138
Encoder output pulses – – –
–
Pr.143
Slight vibration suppression control
selection 1
– – –
–
Pr.144
Slight vibration suppression control
selection 2
– – –
–
Pr.145
Induction voltage compensation – – –
–
Pr.149
Gain changing selection – – –
–
Pr.150
Gain changing condition – – –
–
Pr.151
Gain changing time constant – – –
–
Pr.152
Ratio of load inertia moment to
servomotor inertia moment 2
– – –
–
Pr.153
Position loop gain 2 changing ratio – – –
–
Pr.154
Speed loop gain 2 changing ratio – – –
–
Pr.155
Speed integral compensation
changing ratio
– – –
–
Pr.160
Optional function C – – –
–
Servo expansion parameters 2
Pr.161
Machine resonance suppression
filter 2
– – –
–
Refer to
the section
5.2.7
: Always set
: Set as required ("–" when not set)
: Setting restricted
– : Setting not required (This is an irrelevant item, so the setting value will be ignored. If the value is the default value or within the setting range, there is no
problem.)

 Loading...
Loading...