2.1 Shift Function to Offset Workpiece Position Error
2-2
HW0481924
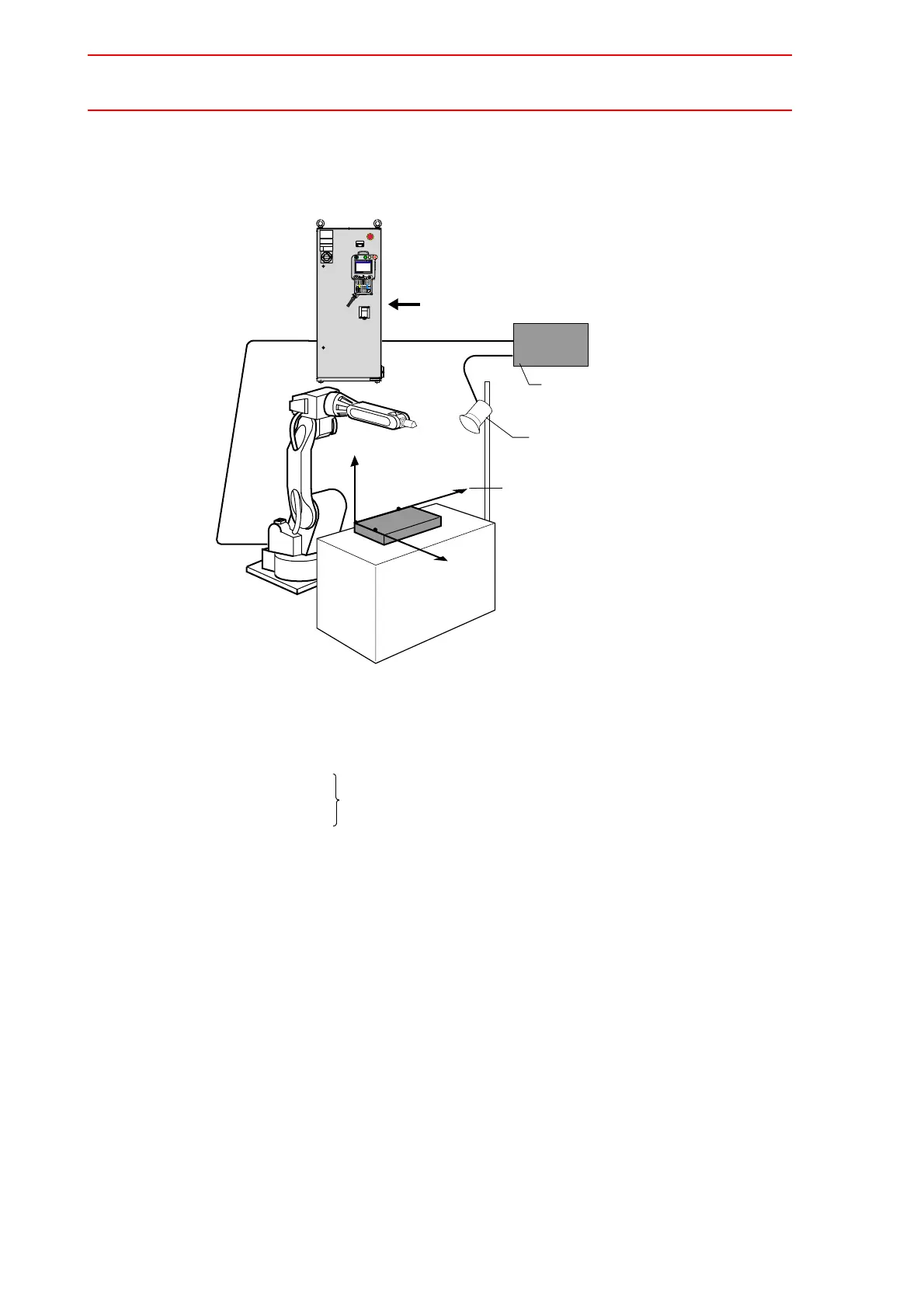
2. Create a user coordinate system for the workpiece. Execute a job that creates a user
coordinate system based on the position data of three definition points detected on the
workpiece by sensors.
3. Create a relative job. Convert “STANDARD-1” created in step 1 into a relative job
called “RELATIVE-1” using user coordinate system No. 1 created in step 2.
Z-Coordinate
Y-Coordinate
X-Coordinate
ExternalComputer,
VisionController,etc.
Camera
a
b
c
PositionDataofa,b,c
ON
R
E
S
E
T
サー
ボ
オン
HOLDSTART
PLAY
TEACH
REMOTE
T
−
Z
ー
T
+
Z
+
B
+
Y
+
R
+
X
+
B
−
Y
ー
R
−
X
ー
・
高速
高
低
手動速度
U
−
Z
ー
U
+
Z
+
L
+
Y
+
S
+
X
+
L
−
Y
ー
S
−
X
ー
・
サーボオン
MOTOMAN
選
択
サーボオン
レディ
メイン
メニュー
ショート
カット
戻る
ページ
エリア
レイアウト
マルチ
画面
キャンセル
アシスト
!?
ダイレクト
オープン
命令一覧
バック
スペース
シフト
インタ
ロック
ロボット
切替
外部軸
切替
補間
用途
テスト
運転
バック
追加
変更
エンタ
ネクスト
消去
シフト
7
4
2
3
. −
5
・
6
0
8
1
9
座
標
座標
ツール選択
エリア
ジョブ
ユーティリティ
編集
表示
メインメニュー ショートカット
!
サーボ電源を投入して下さい
NOP
LOADV P000 Å a
LOADV P001 Åb
LOADV P002 Åc
Position data of points detected by external sensors is
received and stored as position variables.
MFRAME UF#(1) P000 P001 P002
END
ÅUser coordinate system created.

 Loading...
Loading...




