10.4.3 User Manual Contents April 17, 2020
Firmware: 5.2.1 Page 17 of 142
2.2
Wet-End Overview
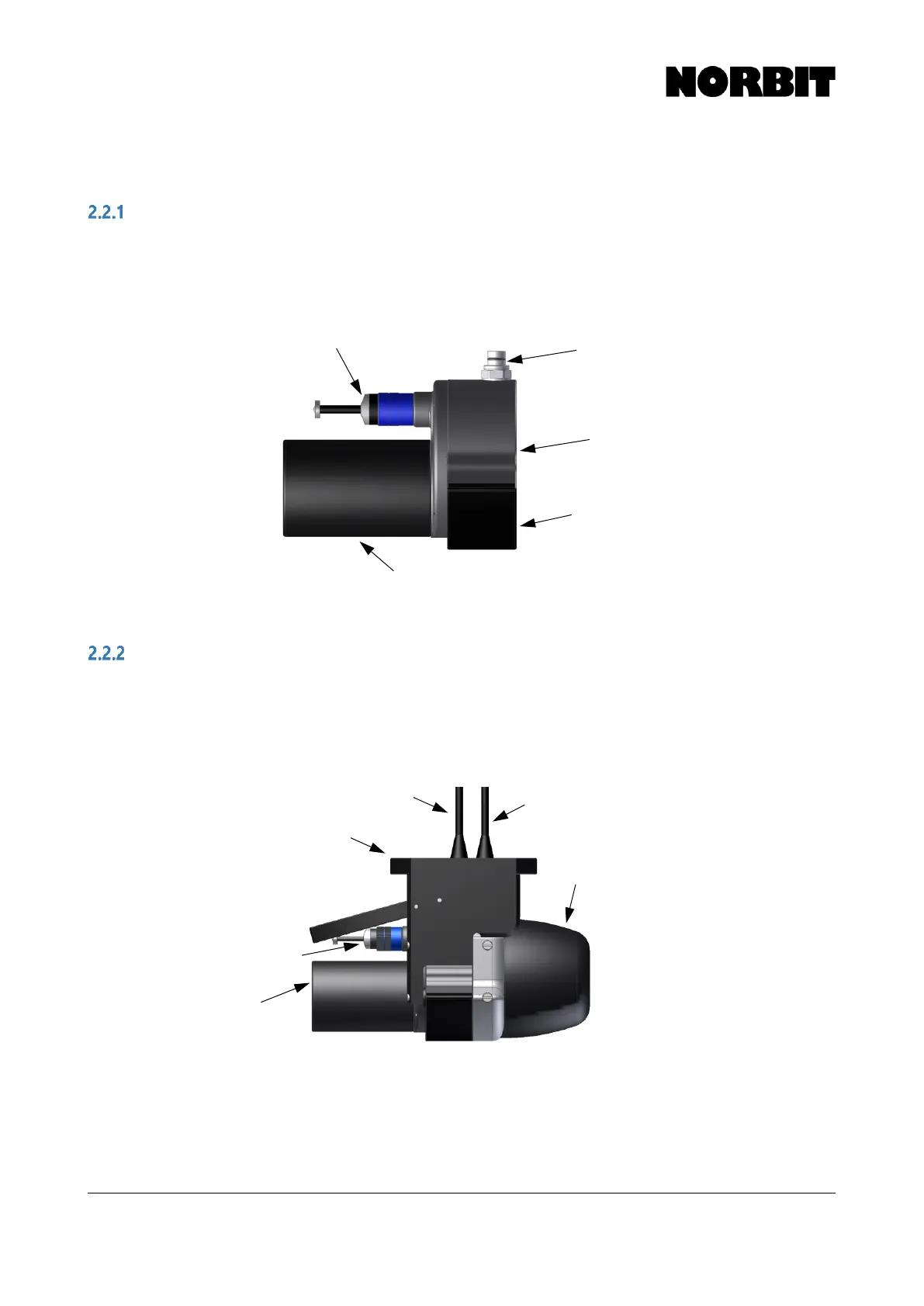
WBMS Sonar Head
The WBMS sonar is comprised of a cylindrical receiver array and a cylindrical projector array. The
receiver housing contains latest FPGA boards where all sonar processing occurs. Data leaving the
WBMS wet-end is ready for survey data acquisition via Ethernet protocol.
iWBMS, iWBMSh, iWBMSe & STX Sonar Head and IMU
iWBMS, iWBMSh, iWBMSe and STX models contain the well-known Applanix GNSS/INS systems.
The systems are equipped with either a MEMS-based or one of two FOG IMUs. The systems are
optionally available with POSPac MMS for full positioning and attitude PPP or PPK solutions. The
IMU is housed inside the ballistic grade front fairing of the wet-end assembly.
iWBMS with standard 1.9°projector. The 0.95° projector adds only 10cm to the length.