108
7.3. Moving Robot to Robot Image Position
For a processing to move the robot to the robot image position, follow the procedures
below.
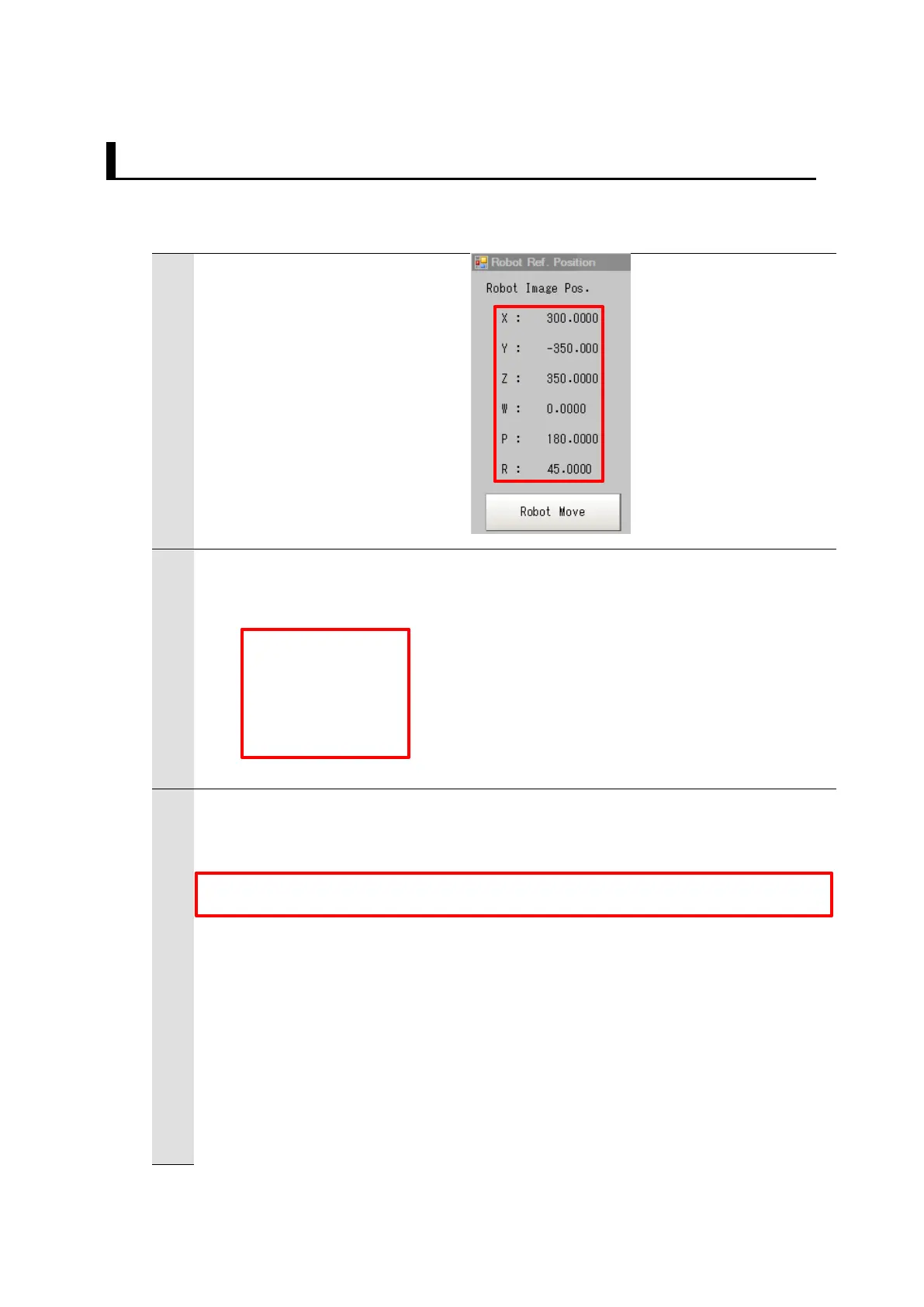
Click [Robot Ref. Position] on
the Main Window of the Vision
Sensor to refer to the set robot
image position.
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
; (2)Move the robot to the imaging position
; You have to configure the following robot position for your application.
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
std_img_pos_x = 300
std_img_pos_y = -350
std_img_pos_y = 350
std_img_pos_y = 0
std_img_pos_y = 180
std_img_pos_y = 45
Set the referenced robot image position to the variables.
;!!!!!!!!! CAUTION !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
; The following function drives a robot motion immediately.
; Confirm the settings before execution.
;!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
CALL fhsample_move(std_img_pos_x, std_img_pos_y, std_img_pos_z, std_img_pos_w,
std_img_pos_p, std_img_pos_r)
; Error check
IF err_no <> success THEN
TYPE "ERROR: fhsample_main():The robot position is out of range :", err_no
GOTO 10
END
TYPE "Move to the imaging position Done."
Set the robot imaging position to the variables.
Robot motion sample function

 Loading...
Loading...














