an amount of the position deviation from the reference
position, and outputs a robot position compensated
from the reference position for the workpiece position
to the robot controller.
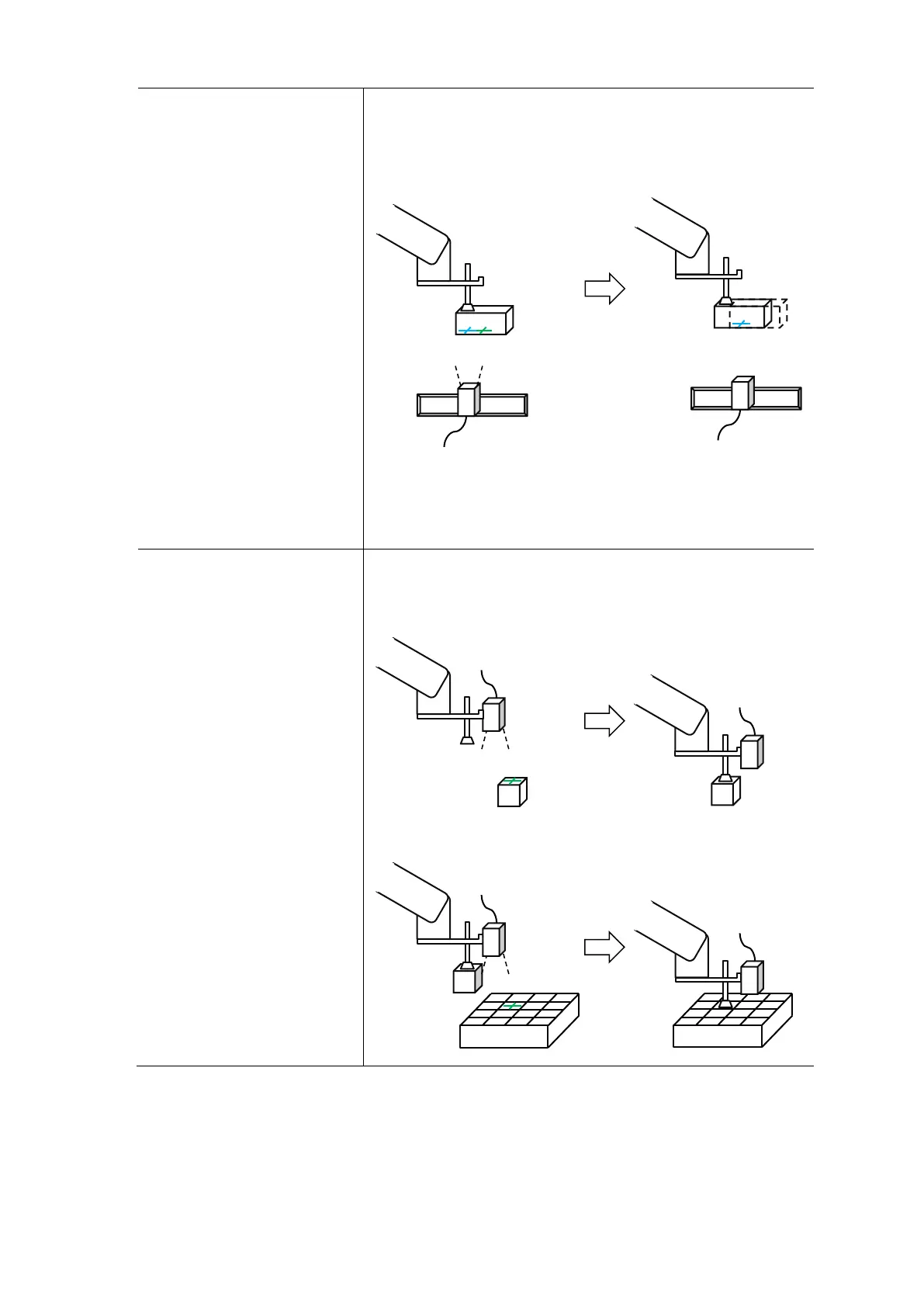
When combining the Grip Correction and Place, the
Vision Sensor outputs a placing position considering
positioning deviation to the robot controller.
In a robot vision system with a camera mounted on the
robot hand, the robot can pick and place a workpiece.

 Loading...
Loading...














