H7BX
29
Explanation of Functions
Settings marked with a star can be performed with the DIP switch.
• Tachometer Input Mode (tinm)
Set the count input mode to one of the following: 1 input (F1), 2 inputs
(F2), error (F3), absolute ratio (F4), or error ratio (F5).
• Tachometer Output Mode (totm) ★
Set the output method for control output based on the OUT1/OUT2
set value. Upper and lower limit (HI-LO), area (AREA), upper limit
(HI-HI), and lower limit (LO-LO) can be set.
(For details on the operation of the output modes, refer to Output
Mode Settings on page 32.)
• Counting Speed (cnts) ★
Set the maximum counting speed (30 Hz/10 kHz) for CP1 input.
If contacts are used for input signals, set the counting speed to 30 Hz.
Processing to eliminate chattering is performed for this setting.
• Decimal Point Position (dp)
Decide the decimal point position for the measurement value, OUT1
set value, and OUT2 set value.
• Prescale Value (pscl)
It is possible to display the rate of rotation or the speed of a device or
machine to which the H7BX is mounted by converting input pulses to
a desired unit. If this prescaling function is not used, the input
frequency (Hz) will be displayed.
The relationship between display and input is determined by the
following equation. Set the prescale value according to the unit to be
displayed.
Displayed value = f × α
f: Input pulse frequency (number of pulses in 1 second)
α: Prescale value
1. Displaying the Rotation Rate
N: Number of pulses per revolution
Example: In order to display the rate of rotation for a machine that
outputs 5 pulses per revolution in the form @@.@ rpm:
1. Set the decimal point position to 1 decimal place.
2. Using the formula, set the prescale value to 1/N × 60 =
60/5 = 12.
2. Displaying the Speed
N: Number of pulses per revolution
d: Diameter of rotating body (m)
πd: Circumference (m)
• Observe the following points when setting a prescale value.
Set the set value to a value less than {Maximum countable value −
Prescale value}.
Example: If the prescale value is 1.25 and the counting range is
0.000 to 999.999, set the set value to a value less than 998.749 (=
999.999 − 1.25).
If the set value is set to a value greater than this, output will not turn
ON.
• Output will turn ON, however, if a present value overflow occurs
(FFFFFF).
• Averaging Method (avgt)
A simple average or moving average can be selected for the
averaging. With the moving average method, the average of the
measurement values is displayed each sampling cycle, in contrast to
a simple average, with which the average of the set number of
samples is displayed.
• Average Processing (avgn) ★
Flickering display and output chattering can be prevented by using
average processing (simple averaging). Average processing can be
set to one of five levels: no average processing, 2 times (i.e., the
average of 2 measurement values), 4 times, 8 times or 16 times.
The measurement cycle will be equal to the sampling cycle (200 ms)
multiplied by the average processing setting (i.e., the number of
times). Average processing enables fluctuating input signals to be
displayed stably. Set the optimum number of times for the application.
• Auto-zero Time (aVto0)
It is possible to set the H7BX so that if there is no pulse for a certain
time the display is force-set to 0. This time is called the auto-zero time.
Set the auto-zero time to a time slightly longer than the estimated
interval between input pulses. It will not be possible to make accurate
measurements if the auto-zero time is set to a time shorter than the
input pulse cycle. Setting a time that is too long may also result in
problems, such as a time-lag between rotation stopping and the alarm
turning ON.
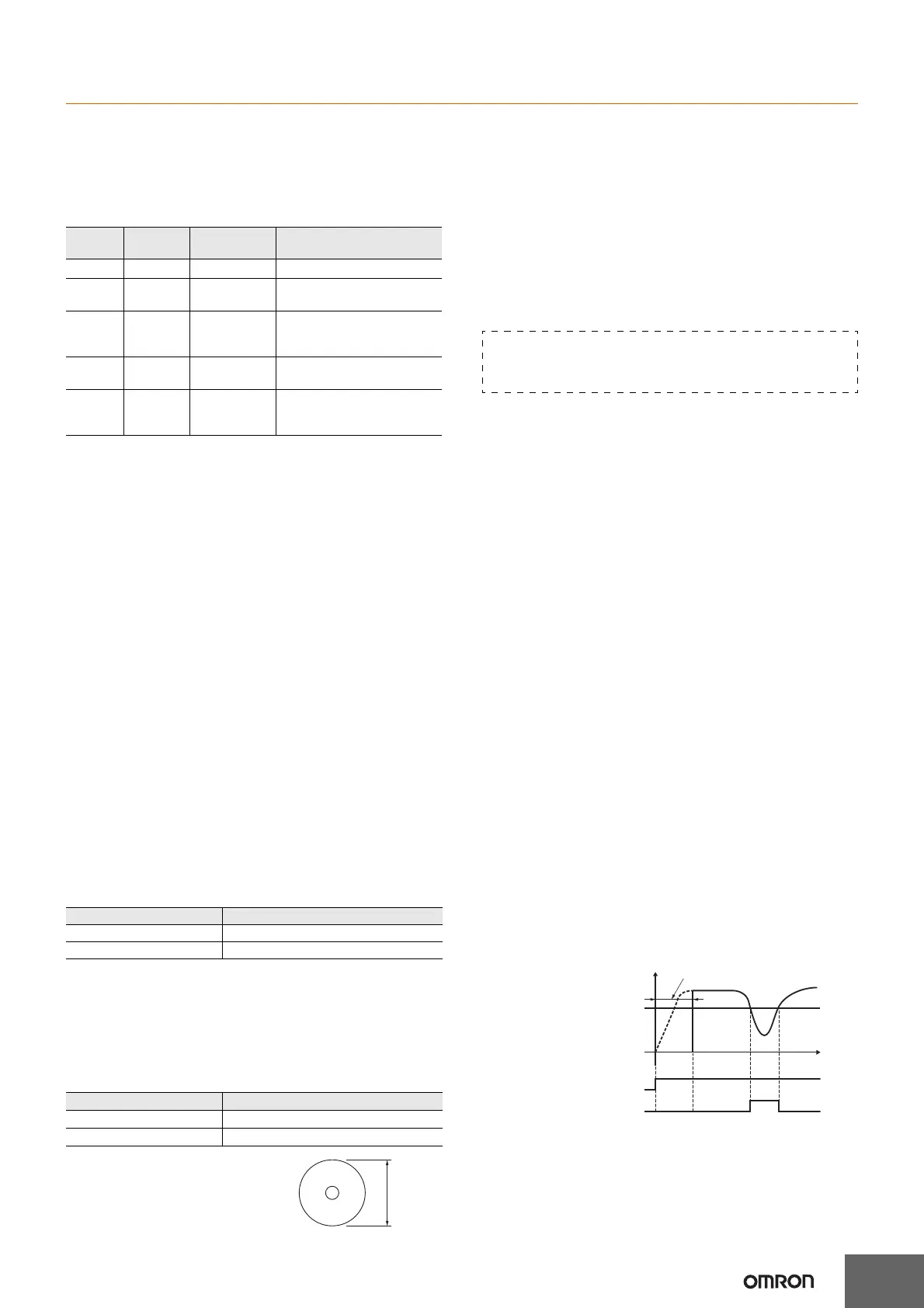
• Startup Time (stmr)
In order to prevent undesired output resulting from unstable input
immediately after the power supply is turned ON, it is possible to
prohibit measurement for a set time. This time is called the startup
time.
It can also be used to stop measurement and disable output until the
rotating body reaches the normal rate of rotation, after the power
supply to the H7BX and rotating body are turned ON at the same time.
• NPN/PNP Input Mode (imod) ★
Select either NPN input (no-voltage input) or PNP input (voltage input)
as the input format. Select an NPN input when using a 2-wire sensor.
The same setting is used for all external inputs.
For details on input connections, refer to Input Connections on page 6.
Input
mode
Input
Internal
processing
Application
1 input Count 1 None Operation with only one input.
2 inputs
Counts
1 and 2
None
Operation with two independent
inputs.
Error
Counts
1 and 2
Count 1 input −
Count 2 input
Measuring the difference
between two inputs (error in
number of revolutions).
Absolute
ratio
Counts
1 and 2
Count 1 input ÷
Count 2 input
Measuring the ratio of two inputs
(ratio of number of revolutions).
Error ratio
Counts
1 and 2
(Count 1 input −
Count 2 input) ÷
Count 2 input
Measuring the ratio of error for
two inputs (measuring the error
ratio of number of revolutions).
Display unit Prescale value (α)
rpm 1/N × 60
rps 1/N
Display unit Prescale value (α)
m/min πd × 1/N × 60
m/s πd × 1/N
d: Diameter
of rotating
body
Note: Incorrectly setting the prescale value will result in
counting errors. Check that the setting has been
performed correctly before using the H7BX.
Startup timeDisplay
Time
Comparison
value
(lower limit)
Output (lower limit)
Power supply