7.EtherCAT Connection Procedure
7.2. Setting Up the Hivertec EtherCAT Slave for Motion Control
Set up the Hivertec EtherCAT Slave for Motion Control.
7.2.1. Hardware Settings
Set the hardware switches on the EtherCAT Slave for Motion Control.
Precautions for Correct Use
Make sure that the power supply is OFF when you perform the setting up.
Make sure that the power supply
to the EtherCAT Slave for
Motion Control is OFF.
* If the power supply is turned
ON, settings may not be
applicable as described in the
following procedures.
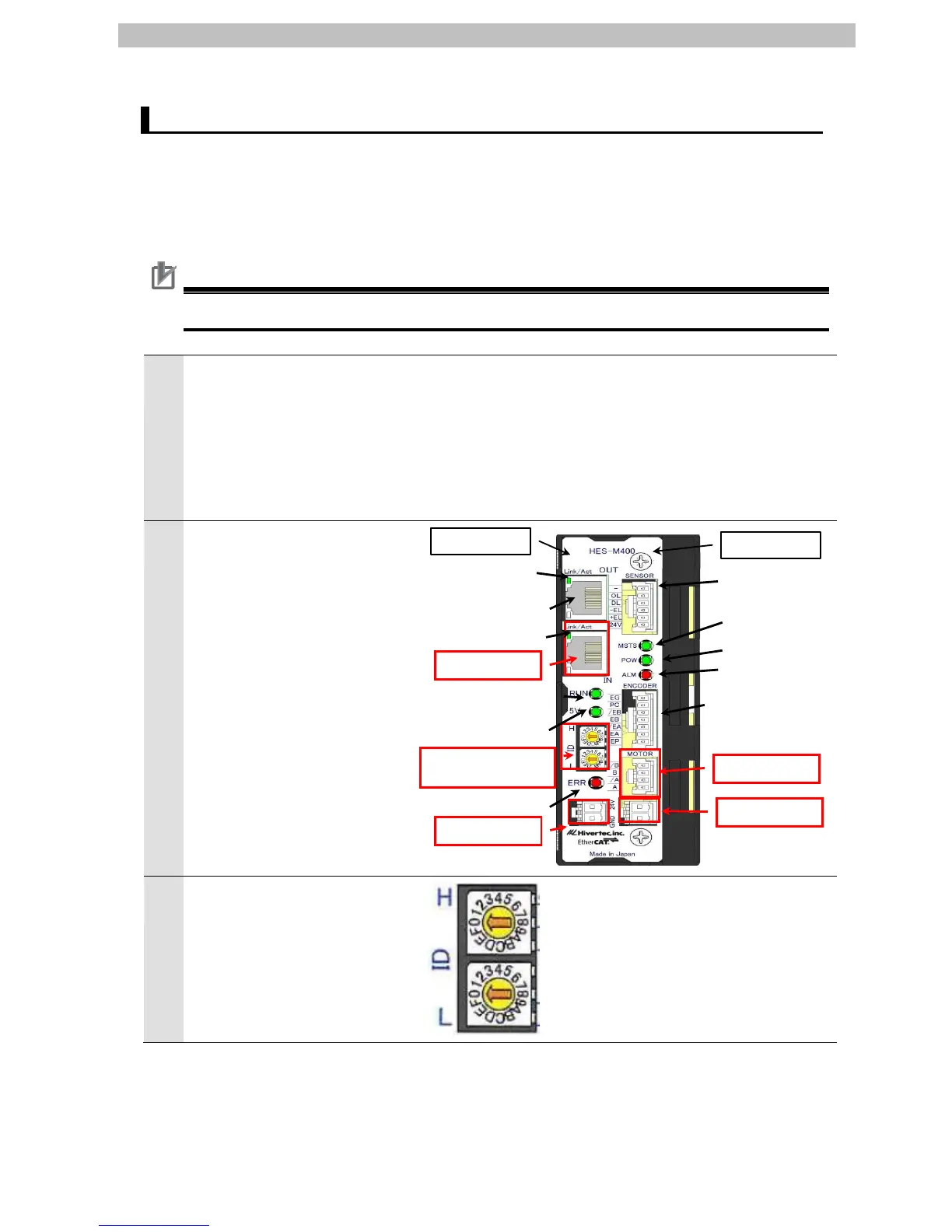
Check the position of the
hardware switches and the
connectors on the front panel of
the EtherCAT Slave for Motion
Control by referring to the right
figure.
Set the Slave ID to 00.
* By setting the Slave ID to 00,
the node address is set to 01.
Node address = Slave ID set
value + 1.
Communication
OUT: LINK/ACT
LED
Communication
OUT: connector
Communication
IN: LINK/ACT LED
Communication
IN: connector
Communication status
indicator LED
Slave ID:
Upper ID = upper slave
Lower ID = lower slave
Encoder input /
Step-out detection
output connector
Connector for
motor output
Driver module
power connector

 Loading...
Loading...












