3 Specifications
3 - 28
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
Note When you do not use the STO function via safety input signals use the STO function via safety input sig-
nals, short-circuit pins 22 and 23, 24 and 26, 3 and 5, and 6 and 7.
When you use the STO function via safety input signals, remove the attached short-circuit wires and do not
connect anything to pins 7 and 22.
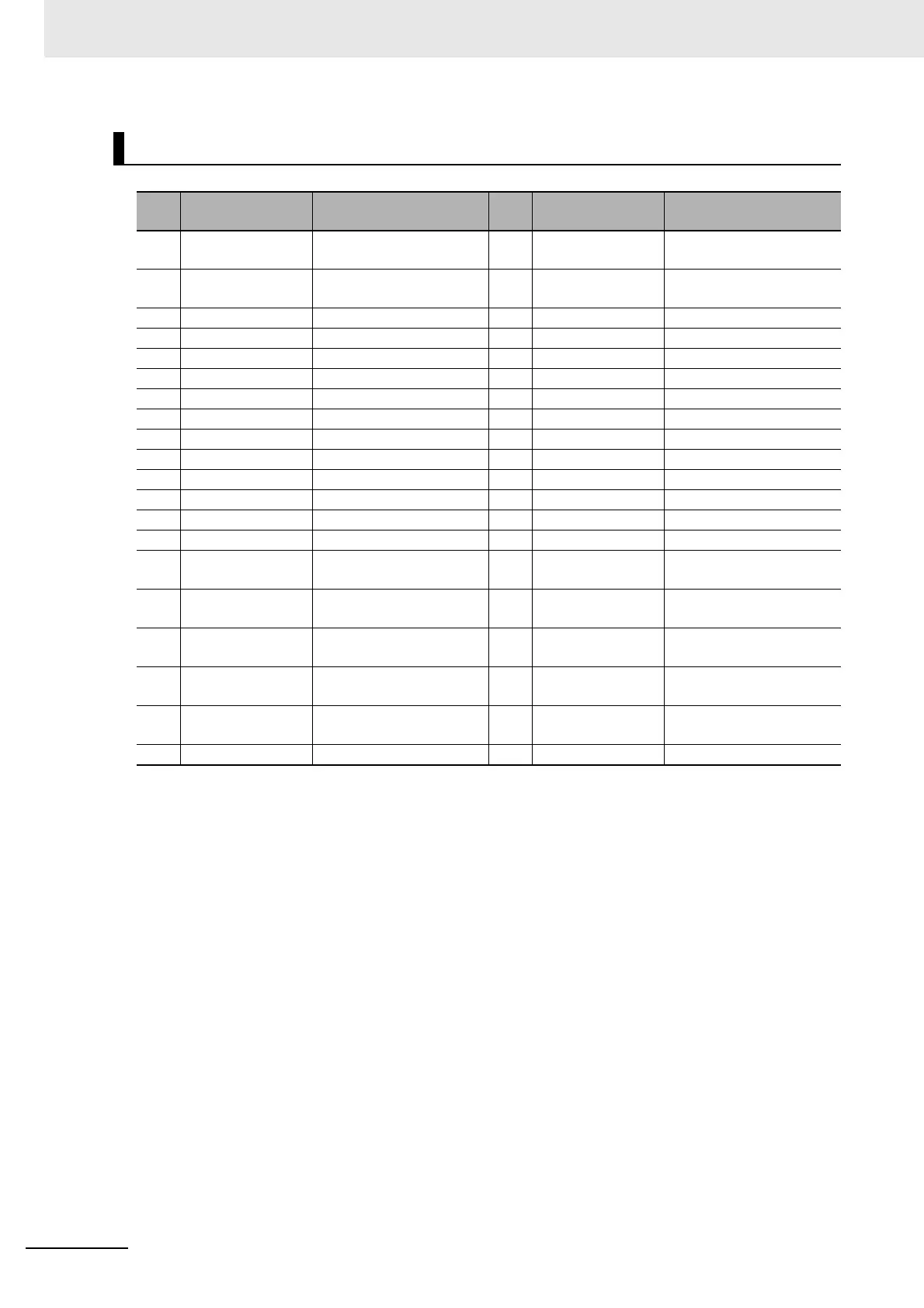
Control I/O Signal Table
Pin
No.
Symbol Signal name
Pin
No.
Symbol Signal name
1
EDM+ P EDM+ Output with
short-circuit protection
21 EDM- EDM- Output
2
EDM+ EDM+ Output without
short-circuit protection
22 SFA Reserved
3 SF1+ SF1+ Input 23 SF1+ SF1+ Input
4 SF1- SF1- Input 24 SF1- SF1- Input
5 SF2+ SF2+ Input 25 SF2+ SF2+ Input
6 SF2- SF2- Input 26 SF2- SF2- Input
7 SFB Reserved 27 NC NC
8 /ERR+ Error Output 28 /ERR- Error Output
9 OUT1+ General Output 1 29 OUT1- General Output 1
10 OUT2+ General Output 2 30 OUT2- General Output 2
11 OUT3+ General Output 3 31 OUT3- General Output 3
12 IN1 General Input 1 32 IN2 General Input 2
13 IN3 General Input 3 33 IN4 General Input 4
14 IN5 General Input 5 34 IN6 General Input 6
15
IN7 General Input 7
(high-speed)
35 IN8 General Input 8
(high-speed)
16
GND GND (for pulse output) 36 COMMON 12 to 24-VDC Power Sup-
ply Input
17
A+ Encoder Pulse Phase-A+
Output
37 A- Encoder Pulse Phase-A-
Output
18
B+ Encoder Pulse Phase-B+
Output
38 B- Encoder Pulse Phase-B-
Output
19
Z+ Encoder Pulse Phase-Z+
Output
39 Z- Encoder Pulse Phase-Z-
Output
20 FG FG 40 FG FG
 Loading...
Loading...

