9 - 39
9 Details on Servo Parameters
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
9-4 Control Loop Objects
9
9-4-10 3224 hex: 2nd Velocity Control Gain
• Sets the 1st velocity proportional gain.
• This object is intended for PDO assignment. Use this object to change the propotional gain from a
PDO.
• Sets the 1st velocity integral gain.
• This object is intended for PDO assignment. Use this object to change the integral gain from a PDO.
Sets the 2nd velocity control gain.
• Sets the 2nd velocity proportional gain.
• Sets the 2nd velocity integral gain.
• Sets the 2nd velocity proportional gain.
• This object is intended for PDO assignment. Use this object to change the propotional gain from a
PDO.
• Sets the 2nd velocity integral gain.
• This object is intended for PDO assignment. Use this object to change the integral gain from a PDO.
Subindex E1 hex: Proportional Gain Command
Subindex E2 hex: Integral Gain Command
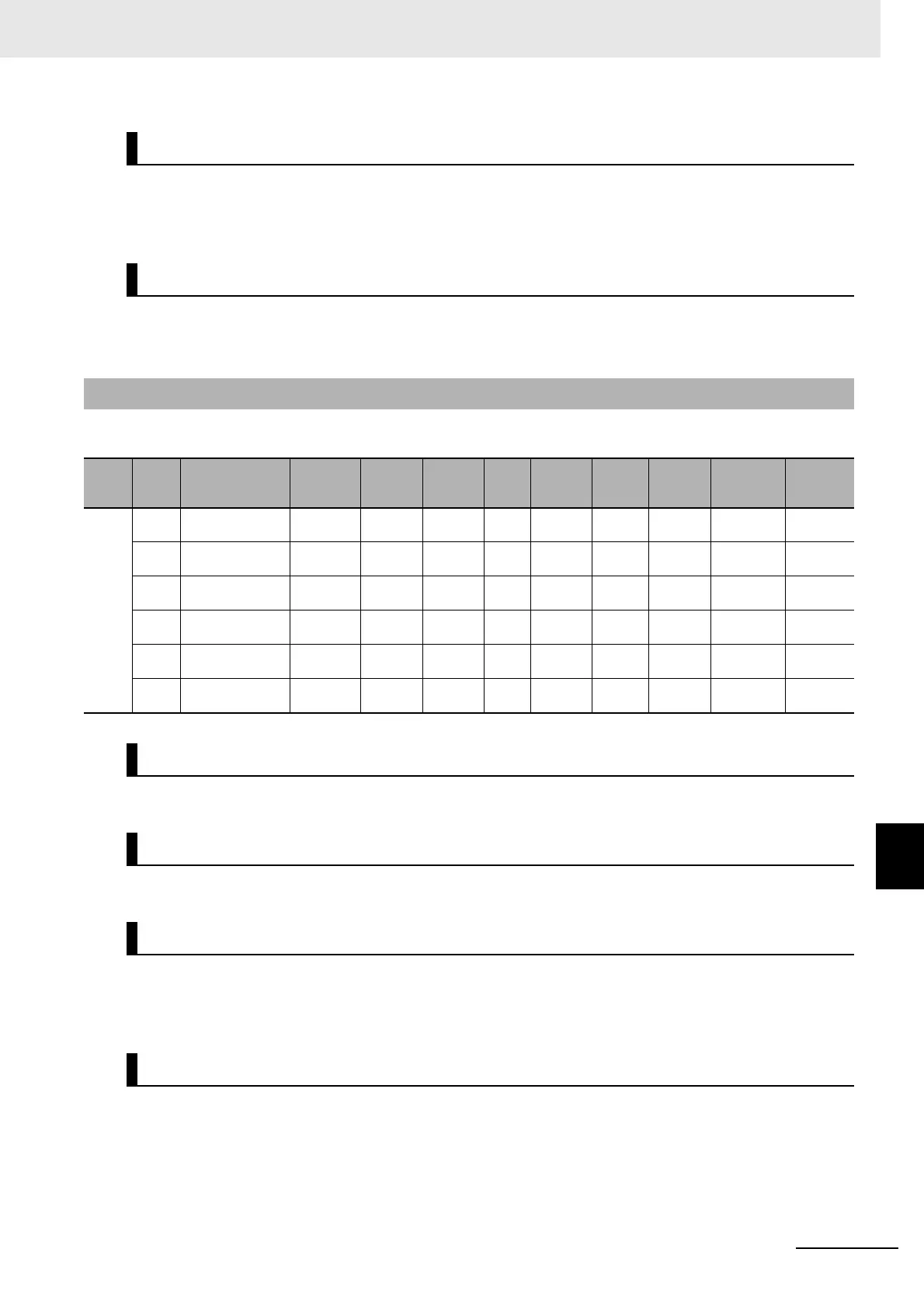
9-4-10 3224 hex: 2nd Velocity Control Gain
Index
(hex)
Sub-
index
(hex)
Object name
Setting
range
Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Complete
access
Modes of
opera-
tion
3224 --- 2nd Velocity Con-
trol Gain
--- --- --- --- --- --- --- Possible ---
00 Number of
entries
--- --- 02 hex --- 1 byte
(U8)
RO --- --- ---
01 Proportional Gain 0 to
30,000
0.1 Hz 219 A 4 bytes
(INT32)
RW --- --- csv, pv
02 Integral Gain 0 to
16,000
0.1 Hz 55 A 4 bytes
(INT32)
RW --- --- csv, pv
E1 Proportional Gain
Command
0 to
30,000
0.1 Hz 219 A 4 bytes
(INT32)
W RxPDO --- csv, pv
E2 Integral Gain
Command
0 to
16,000
0.1 Hz 55 A 4 bytes
(INT32)
W RxPDO --- csv, pv
Subindex 01 hex: Proportional Gain
Subindex 02 hex: Integral Gain
Subindex E1 hex: Proportional Gain Command
Subindex E2 hex: Integral Gain Command
 Loading...
Loading...

