7 Applied Functions
7 - 38
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
If Mode Selection is set to 3, you can switch between Gain 1 and Gain 2 by using the position com-
mand and the motor velocity.
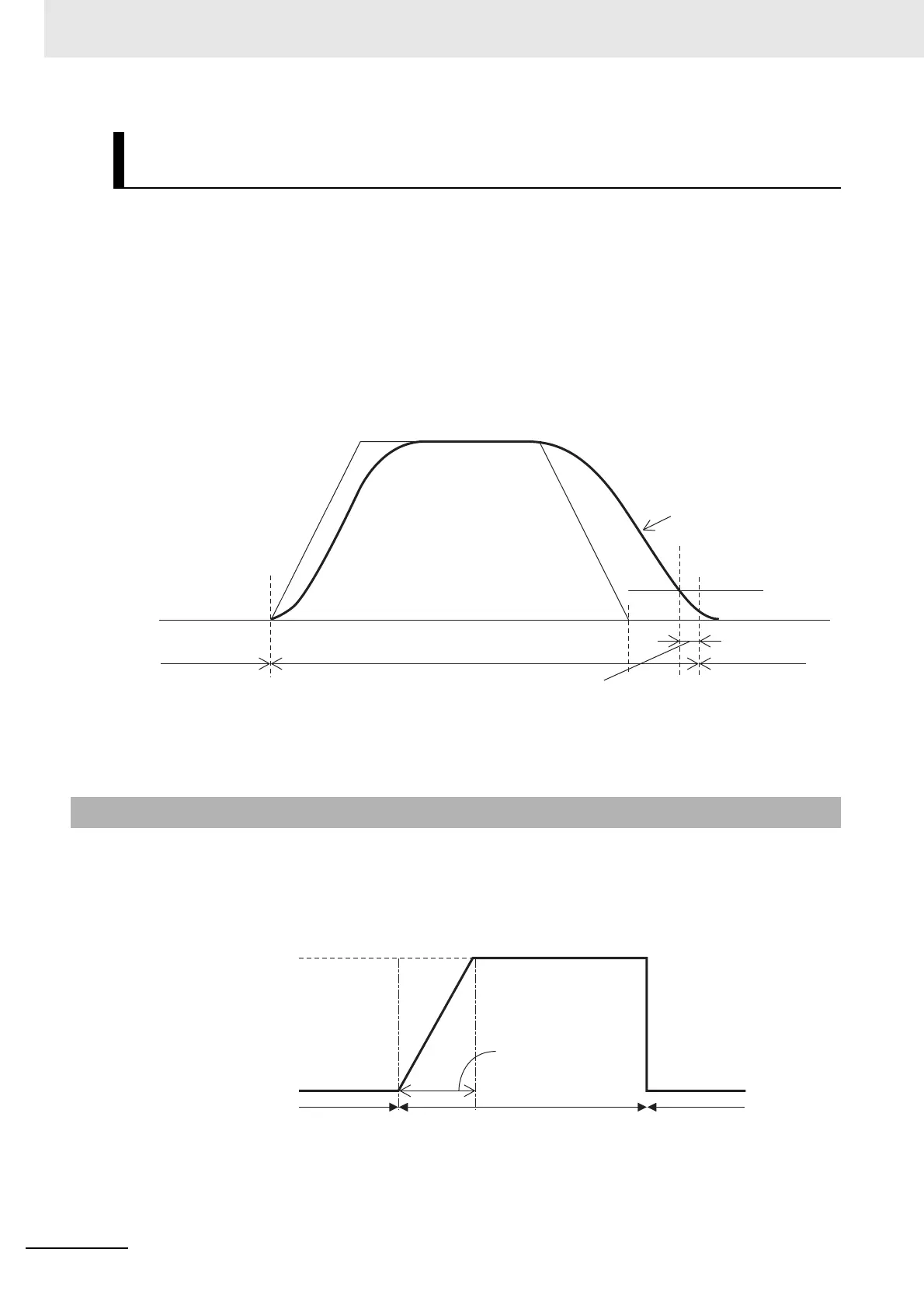
Set the Gain Switching in Position Control - Speed (3212-03 hex) to a speed threshold to switch
from Gain 2 to Gain 1. You can set the delay time for this switching operation in Delay Time (3212-02
hex).
Gain 1 switches to Gain 2 when the position command velocity becomes a value other than 0.
After the operation is performed, the position command velocity becomes 0, and Gain 2 switches to
Gain 1 when the motor velocity reaches the set Gain Switching in Position Control – Speed
(3212-03 hex) or lower and the Gain Switching in Position Control – Delay Time (3212-02 hex)
elapses.
After Gain 2 switched to Gain 1, the Gain 1 is held even if overshooting occurs and the motor velocity
exceeds the Gain Switching in Position Control - Speed (3212-03 hex).
In position control, vibration may occur if Gain 1 and Gain 2 are switched and the gain increases rap-
idly. To switch the gain gradually and suppress the vibration, set Position Gain Switching - Time
(3212-04 hex).
When the gain changes from a lower set value to a higher set value, it increases in the specified time.
When the gain changes to a lower value, the change occurs immediately.
When Mode Selection = 3: Actual motor velocity with position com-
mand
7-10-3 Gain Switching in Position Control
Position command velocity
Motor velocity
Gain 1 Gain 1Gain 2
Gain Switching in
Position Control -
Speed (3212-03 hex)
Gain Switching in Position Control -
Delay Time (3212-02 hex)
Gain 1 Gain 1Gain 2
Gain 2 set value
Gain 1 set value
Position Gain
Switching - Time
(3212-04 hex)
 Loading...
Loading...

