9 - 73
9 Details on Servo Parameters
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
9-7 Applied Function Objects
9
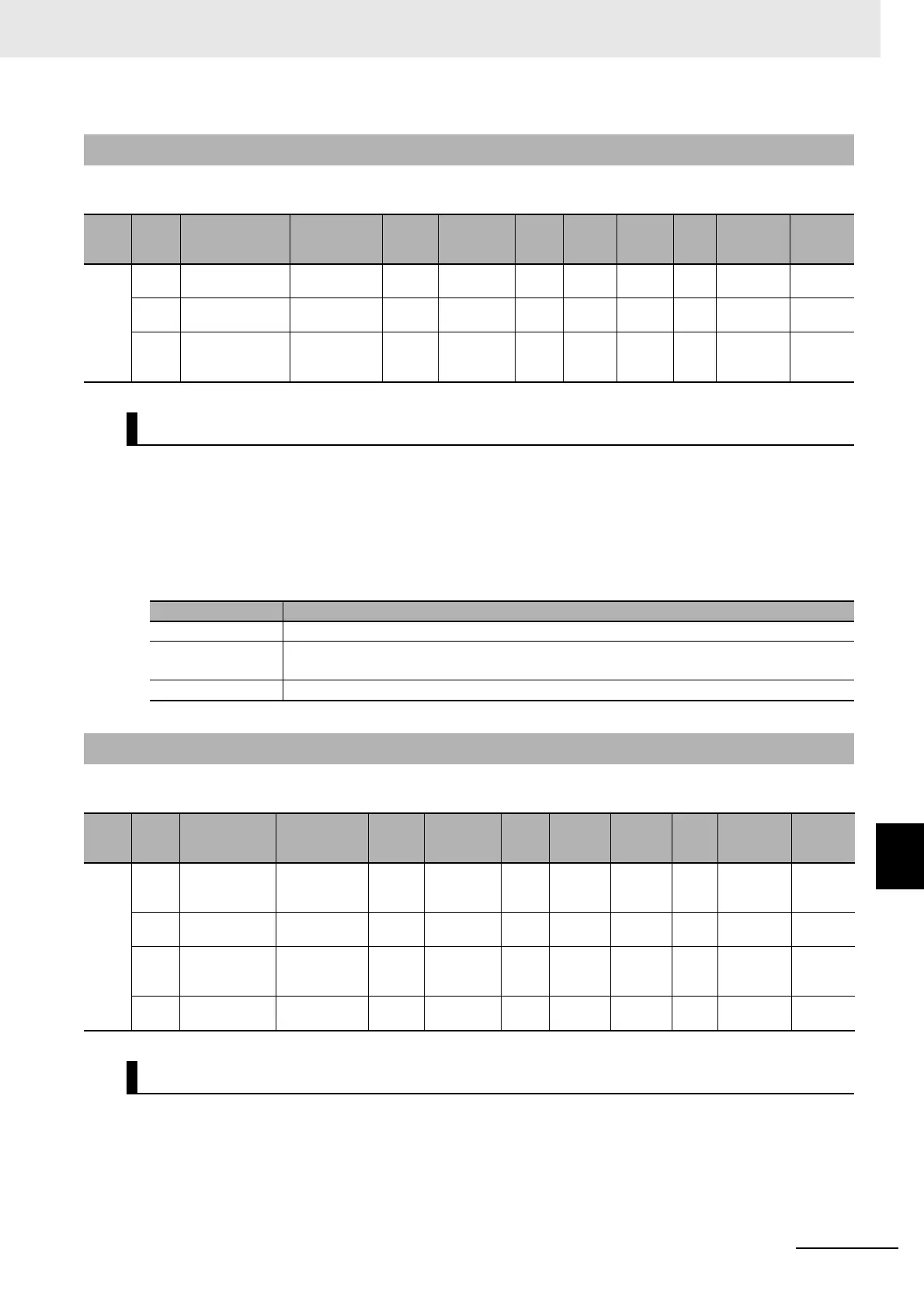
9-7-9 3B50 hex: Position Detection Function
Sets the Position Detection Function.
• Sets the threshold for a following error.
• When the following error is more than or equal to this set value, an Excessive Position Deviation
Error (Error No. 24.00) is detected.
• Mirror object of 6065 hex
Description of Set Values
Sets the condition of the Positioning Completion Output (INP1).
• When the following error is less than or equal to the set value of this object, the Positioning Comple-
tion Output 1 (INP1) turns ON.
• This setting is also used as the threshold for detecting Target reached flag in the EtherCAT communi-
cations status.
• Mirror object of 6067 hex
9-7-9 3B50 hex: Position Detection Function
Index
(hex)
Sub-
index
(hex)
Object name Setting range Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Complete
access
Modes
of oper-
ation
3B50 --- Position Detec-
tion Function
--- --- --- --- --- --- --- Possible ---
00 Number of
entries
--- --- 05 hex --- 1 byte
(U8)
RO --- --- ---
05 Following Error
Window
0 to
4,294,967,295
Com-
mand
unit
84,000,000 A 4 bytes
(U32)
RW --- --- csp, pp,
hm
Subindex 05 hex: Following Error Window
Set value Description
0 to 2,147,483,647 Enabled at the value set in the Following error window
2,147,483,648 to
4,294,967,294
Enabled at 2,147,483,647 hex as the value set in the Following error window
4,294,967,295 Excessive position deviation detection disabled
9-7-10 3B51 hex: Positioning Completion Notification
Index
(hex)
Sub-
index
(hex)
Object name Setting range Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Complete
access
Modes
of oper-
ation
3B51 --- Positioning
Completion
Notification
--- --- --- --- --- --- --- Possible ---
00 Number of
entries
--- --- 81 hex --- 1 byte
(U8)
RO --- --- ---
01 Position Win-
dow
1 to
2,147,483,647
Com-
mand
unit
8,000 A 4 bytes
(U32)
RW --- --- csp, pp,
hm
81 Status --- --- --- --- 4 bytes
(INT32)
RO --- --- csp, pp,
hm
Subindex 01 hex: Position Window
 Loading...
Loading...

