7 - 49
7 Applied Functions
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
7-13 Dynamic Brake
7
7-13-3 Description of Operation
When control power supply is off, the dynamic brake is as follows.
• Capacity 3 kW or less: The dynamic brake is applied.
• Capacity 5.5 kW or more: The dynamic brake is released and free.
When the control power supply is turned ON, the dynamic brake operation or free-run is performed
according to the setting of Stop Selection – Shutdown Option Code (3B20-01 hex).
Precautions for Correct Use
• Do not drive the Servomotor by the use of an external drive source when the power supply is
OFF and the dynamic brake is applied.
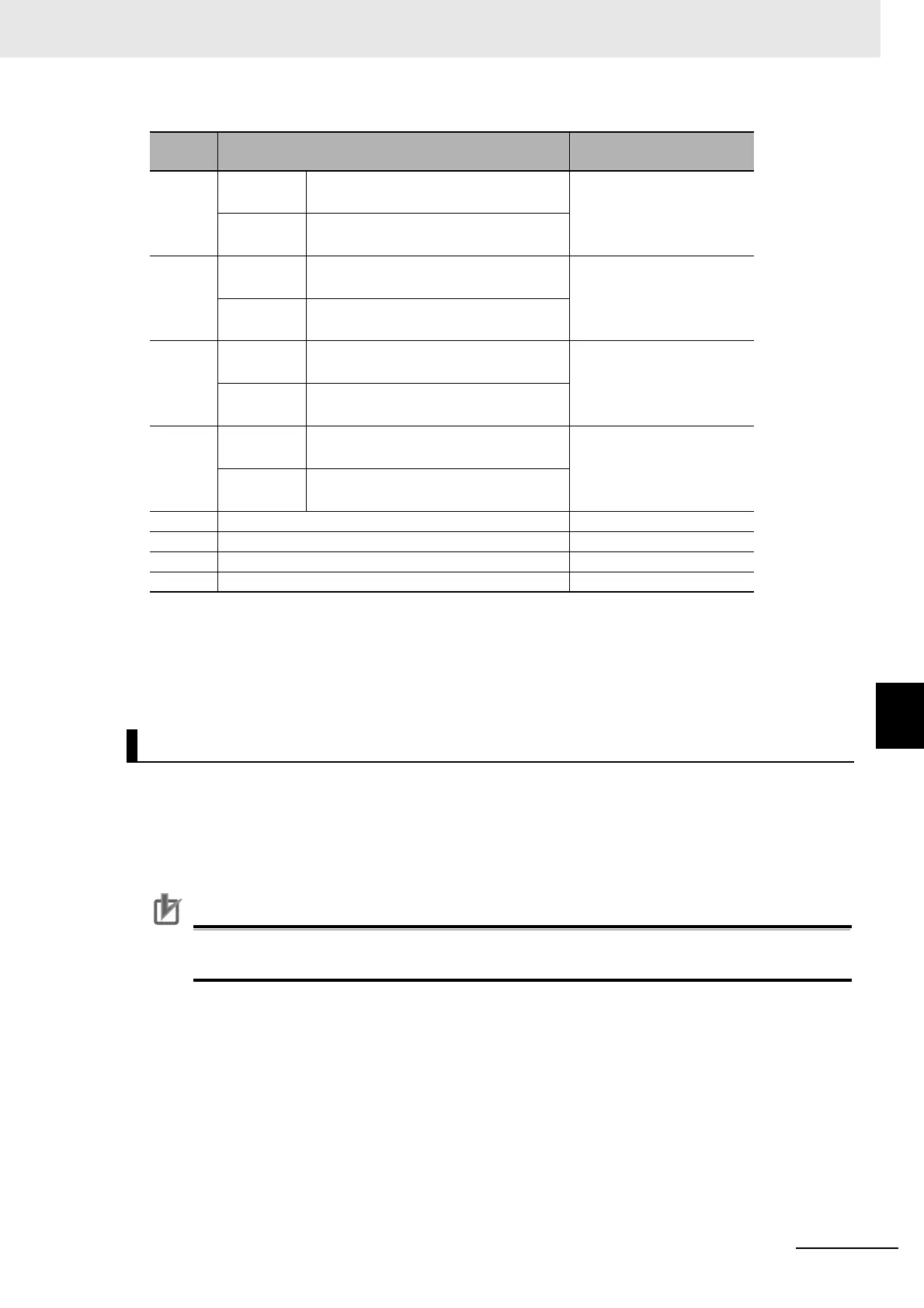
Set
value
Deceleration operation Operation after stopping
-7 Operation
A
*1
*1. Operation A and B indicate whether or not to perform the deceleration stop when an error
occurs. If an error that causes the deceleration stop occurs, the deceleration stop is per-
formed according to the setting of Operation A. If an error that does not cause the decelera-
tion stop occurs, the dynamic brake operation or free-run is performed according to the
setting of Operation B. For details on errors, refer to 12-3 Errors on page 12-10.
Deceleration stop (The deceleration stop
torque is used.)
Free
Operation
B
*1
Free-run
-6 Operation
A
*1
Deceleration stop (The deceleration stop
torque is used.)
Free
Operation
B
*1
Dynamic brake operation
-5 Operation
A
*1
Deceleration stop (The deceleration stop
torque is used.)
Dynamic brake operation
Operation
B
*1
Free-run
-4 Operation
A
*1
Deceleration stop (The deceleration stop
torque is used.)
Dynamic brake operation
Operation
B
*1
Dynamic brake operation
-3 Dynamic brake operation Free
-2 Free-run Dynamic brake operation
-1 Dynamic brake operation Dynamic brake operation
0 Free-run Free
Control Power Supply OFF
 Loading...
Loading...

