A - 33
Appendices
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
A-2 CoE Objects
A
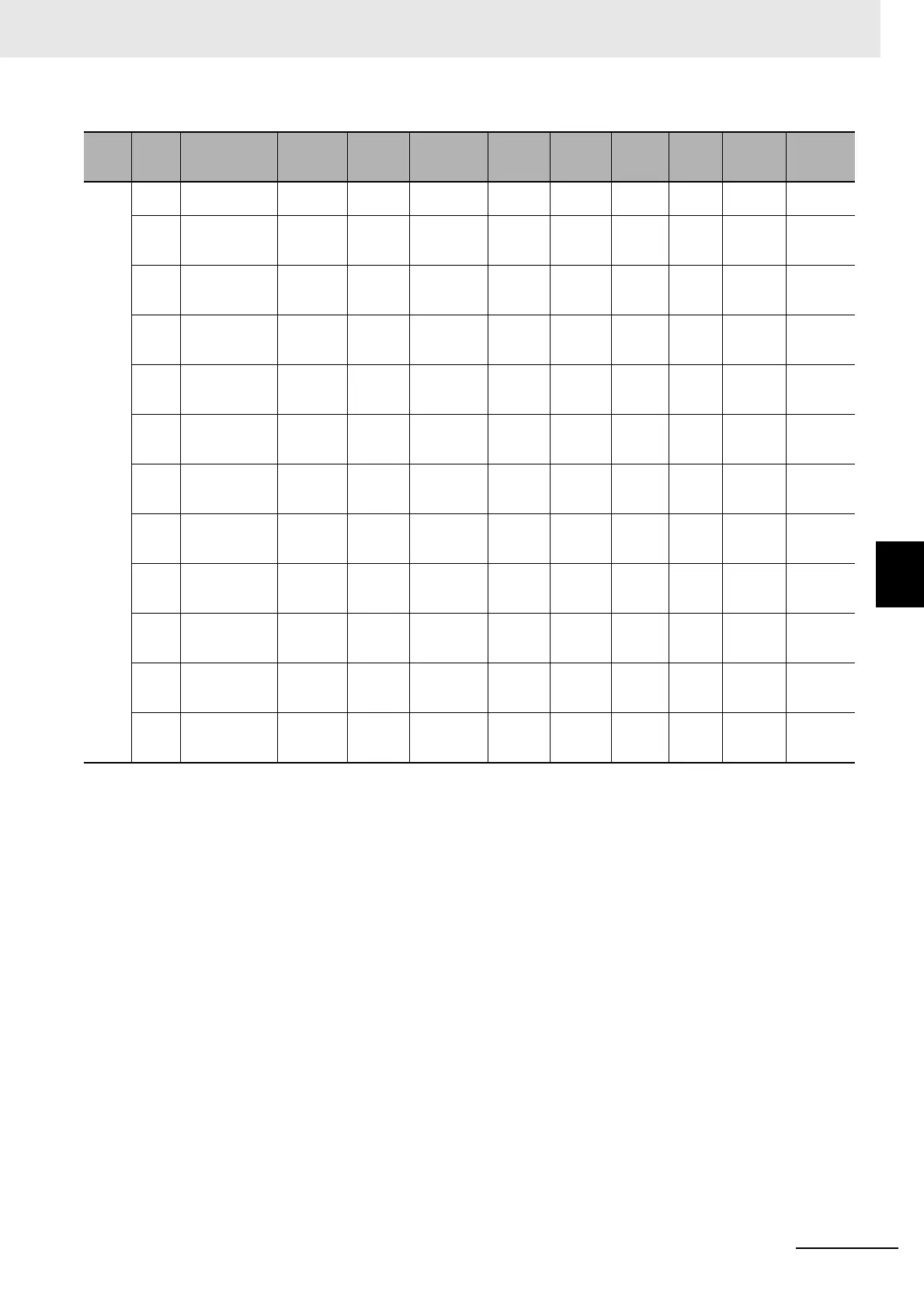
A-2-5 PDO Mapping Objects
• This is the mapping for an application that switches the mode of operation.
• The touch probe function is available. Only one latch position value is available.
• The following objects are mapped.
Error code (603F hex), Statusword (6041 hex), Position actual value (6064 hex), Torque actual
value (6077 hex), Modes of operation display (6061 hex), Touch probe status (60B9 hex), Touch
probe 1 positive edge (60BA hex), Touch probe 2 positive edge (60BC hex), Digital inputs
(60FD hex), and Velocity actual value (606C hex)
Index
(hex)
Sub-
index
(hex)
Object name
Setting
range
Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Com-
plete
access
Modes of
operation
1B04 --- 261th transmit
PDO Mapping
--- --- --- --- --- --- --- Possible ---
00 Number of
objects in this
PDO
--- --- 0A hex --- 1 byte
(U8)
RO --- --- ---
01 1st Output
Object to be
mapped
--- --- 603F0010
hex
--- 4 bytes
(U32)
RO --- --- ---
02 2nd Output
Object to be
mapped
--- --- 60410010
hex
--- 4 bytes
(U32)
RO --- --- ---
03 3rd Input
Object to be
mapped
--- --- 60640020
hex
--- 4 bytes
(U32)
RO --- --- ---
04 4th Input
Object to be
mapped
--- --- 60770010
hex
--- 4 bytes
(U32)
RO --- --- ---
05 5th Input
Object to be
mapped
--- --- 60610008
hex
--- 4 bytes
(U32)
RO --- --- ---
06 6th Input
Object to be
mapped
--- --- 60B90010
hex
--- 4 bytes
(U32)
RO --- --- ---
07 7th Input
Object to be
mapped
--- --- 60BA0020
hex
--- 4 bytes
(U32)
RO --- --- ---
08 8th Output
Object to be
mapped
--- --- 60BC0020
hex
--- 4 bytes
(U32)
RO --- --- ---
09 9th Input
Object to be
mapped
--- --- 60FD0020
hex
--- 4 bytes
(U32)
RO --- --- ---
0A 10th Input
Object to be
mapped
--- --- 606C0020
hex
--- 4 bytes
(U32)
RO --- --- ---
 Loading...
Loading...

