on off
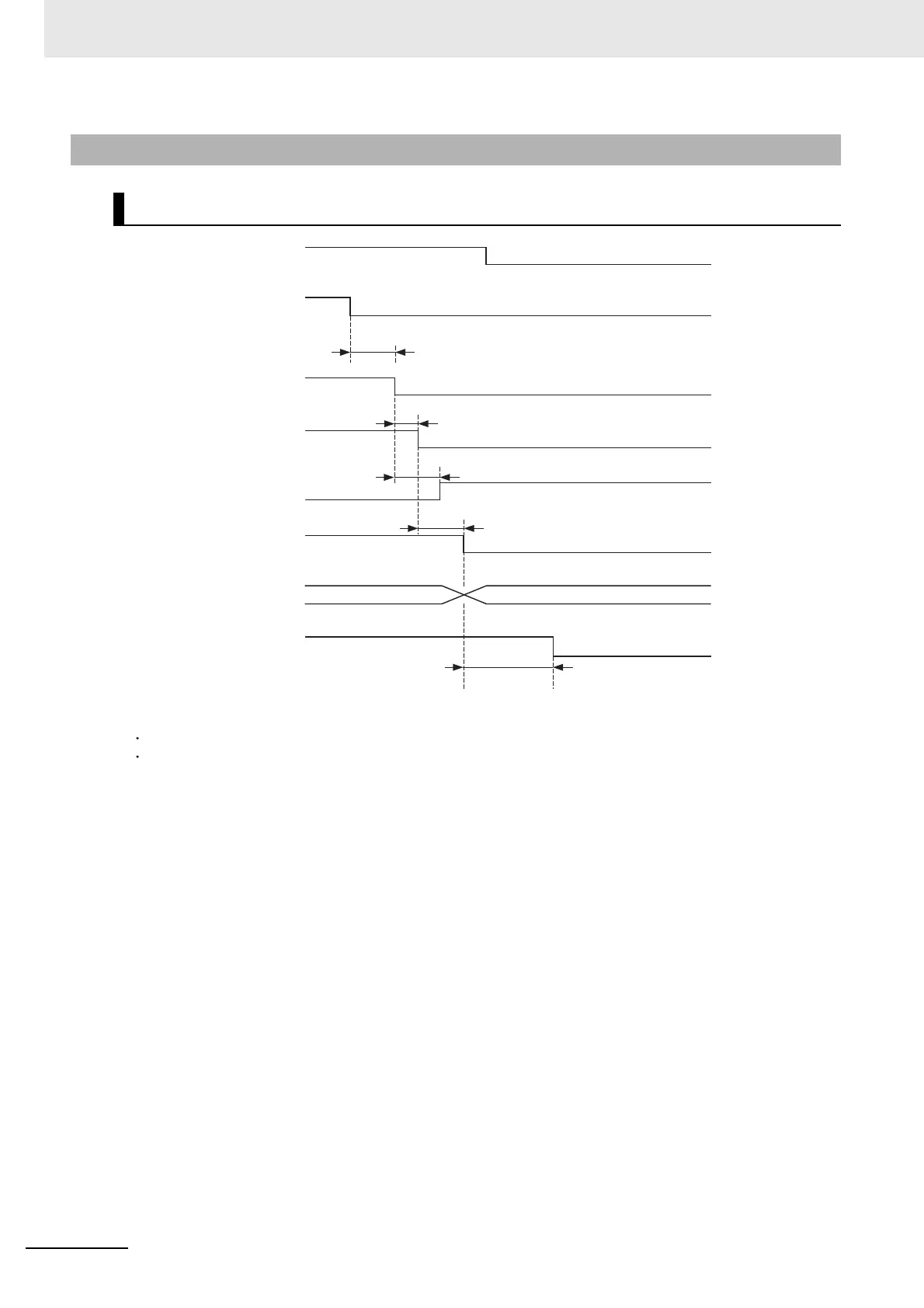
Operation enabled Switched on disabled
PDS state
Brake Interlock
Output (BKIR)
Communication time is determined by
the following factors.
Safety CPU Unit cycle time
EtherCAT Communications cycle
Inactive Active
T
Reset STO
STO command
at Safety CPU Unit
at Servo Drive
at Servo Drive
Motor power status
Activate STO
Communication time
Activate STO
Reset STO
Normal status
7 ms max.
10 ms max.
15 ms max.
T is determined by a set value of the following objects, whichever comes earlier.
4610-02 hex
4610-03 hex
: Brake Interlock Output – Timeout at Servo OFF
: Brake Interlock Output – Threshold Speed at Servo OFF
Servo ON Servo OFF
Reaction time
DB released
DB applied
Dynamic brake
Servo ON/OFF
STO command
STO status
STO status