12 Troubleshooting
12 - 44
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
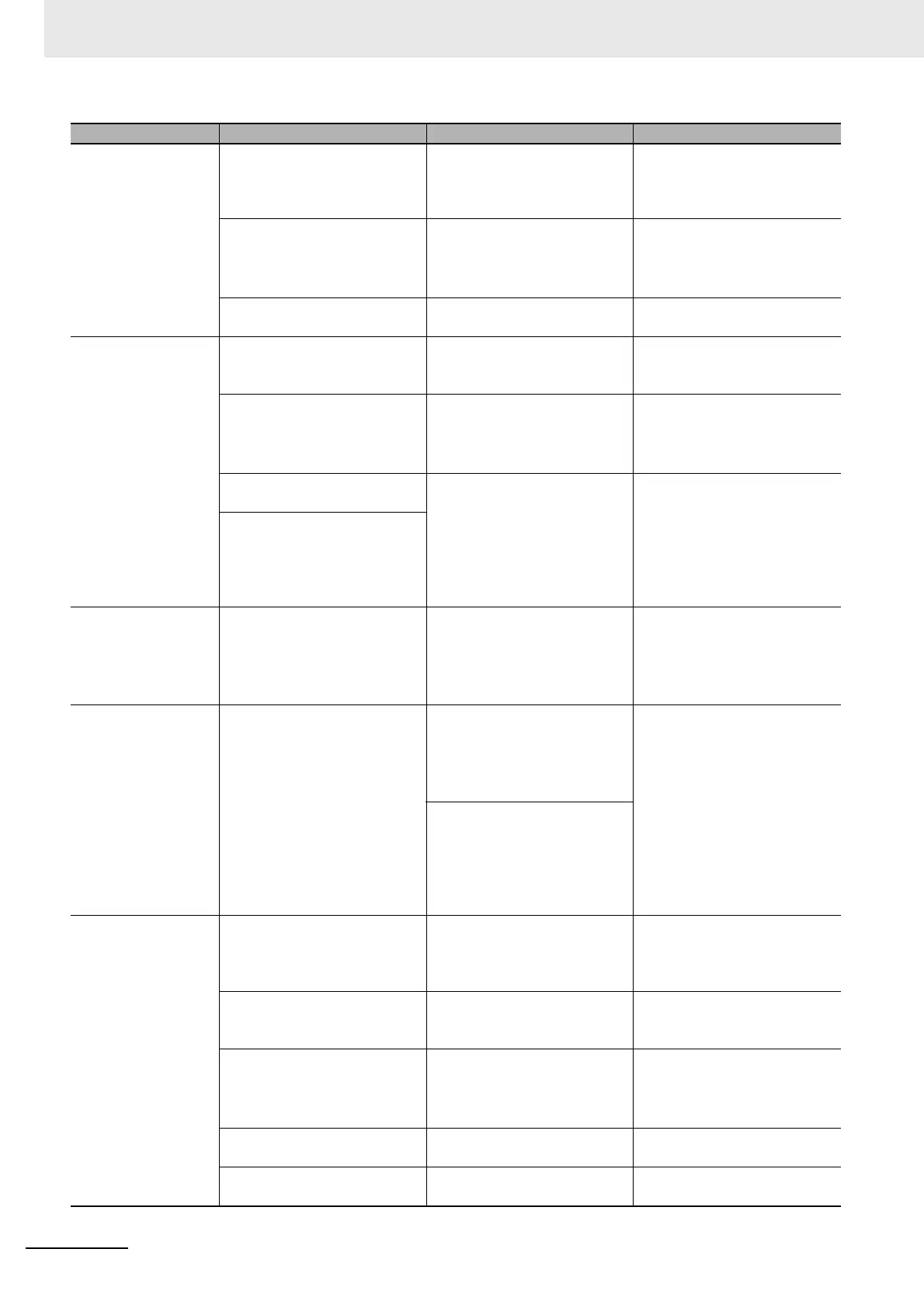
The Servomotor
rotates in the reverse
direction from the
command.
The value set in Motor Rota-
tion Direction Selection
(3000-01 hex) is incorrect.
Check the value of Motor
Rotation Direction Selection.
Change the value of Motor
Rotation Direction Selection.
The command given by the
host controller is incorrect.
• The size of the absolute com-
mand is set incorrect.
• The polarity of an incremen-
tal command is set incorrect.
• Check the actual and target
values.
• Check the rotation direction.
The Servomotor power cable is
wired incorrectly.
Check the wiring. Wire correctly.
When the runaway
detection function is
enabled, the
Servomotor rotates in
the reverse direction
from the command.
The value set in Motor Rota-
tion Direction Selection
(3000-01 hex) is incorrect.
Check the value of Motor
Rotation Direction Selection.
Change the value of Motor
Rotation Direction Selection.
The command given by the
host controller is incorrect.
• The size of the absolute com-
mand is set incorrect.
• The polarity of an incremen-
tal command is set incorrect.
• Check the actual and target
values.
• Check the rotation direction.
The Servomotor power cable is
wired incorrectly.
Check the wiring. Wire correctly.
The Servomotor power cable is
wired incorrectly, and condi-
tions under which the runaway
detection function cannot work
are satisfied.
The holding brake
does not work.
Power is supplied to the hold-
ing brake.
Check to see if power is sup-
plied to the holding brake.
• Check the Brake Interlock
Output (BKIR) signal and the
relay circuit.
• Check to see if the holding
brake is worn down.
The applied timing for
the holding brake is
early.
The set value of Brake Inter-
lock Output (4610 hex) does
not match the machine.
Review the setting of Brake
Interlock Output (4610 hex).
Adjust Brake Interlock Out-
put (4610 hex).
Check the unit version of the
Servo Drive. The default setting
of Brake Interlock Output -
Threshold Speed at Servo
OFF (4610-03 hex) is large for
the unit version Ver.1.4 or later.
Motor rotation is
unstable.
The motor power cable or
encoder cable is wired incor-
rectly.
Check the wiring of the motor
power cable’s phases U, V, W
and check the encoder cable’s
wiring.
Wire correctly.
Low rigidity is causing vibration. Measure the vibration fre-
quency of the load.
Enable the damping control.
Set the damping filter fre-
quency.
The load’s moment of inertia
exceeds the Servo Drive’s
allowable value.
Calculate the load inertia. • Check if manual tuning can
achieve proper adjustment.
• Increase the Servomotor
capacity.
Loose joint and/or large clear-
ance with the machine.
Check the joint with the
machine.
Remove the joint looseness
with the machine.
The load and gain do not
match.
Check the response waveforms
for speed and torque.
Perform the tuning again to sta-
bilize the rotation.
Symptom Probable cause Check items Measures
 Loading...
Loading...

