6 Basic Control Functions
6 - 26
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
Settings for Configuring Ring Topology in EtherCAT Network
When you build a safety system using FSoE communications, you also need to set the following
item. As for the detail, refer to the NX-series Safety Control Unit User’s Manual (Cat. No. Z930).
Precautions for Correct Use
• Do not rotate the Servomotor at more than 2,147,483,647 [command unit] if the power supply
of NJ/NX-series CPU Unit is OFF when you use the absolute encoder. When the power sup-
ply is turned ON, the CPU Unit cannot restore the present position.
• Do not rotate the Servomotor at more than 2,147,483,647 [command unit] if EtherCAT com-
munications are not established with the NJ/NX-series CPU Unit when you use the absolute
encoder. When communications are established, the CPU Unit cannot restore the present
position.
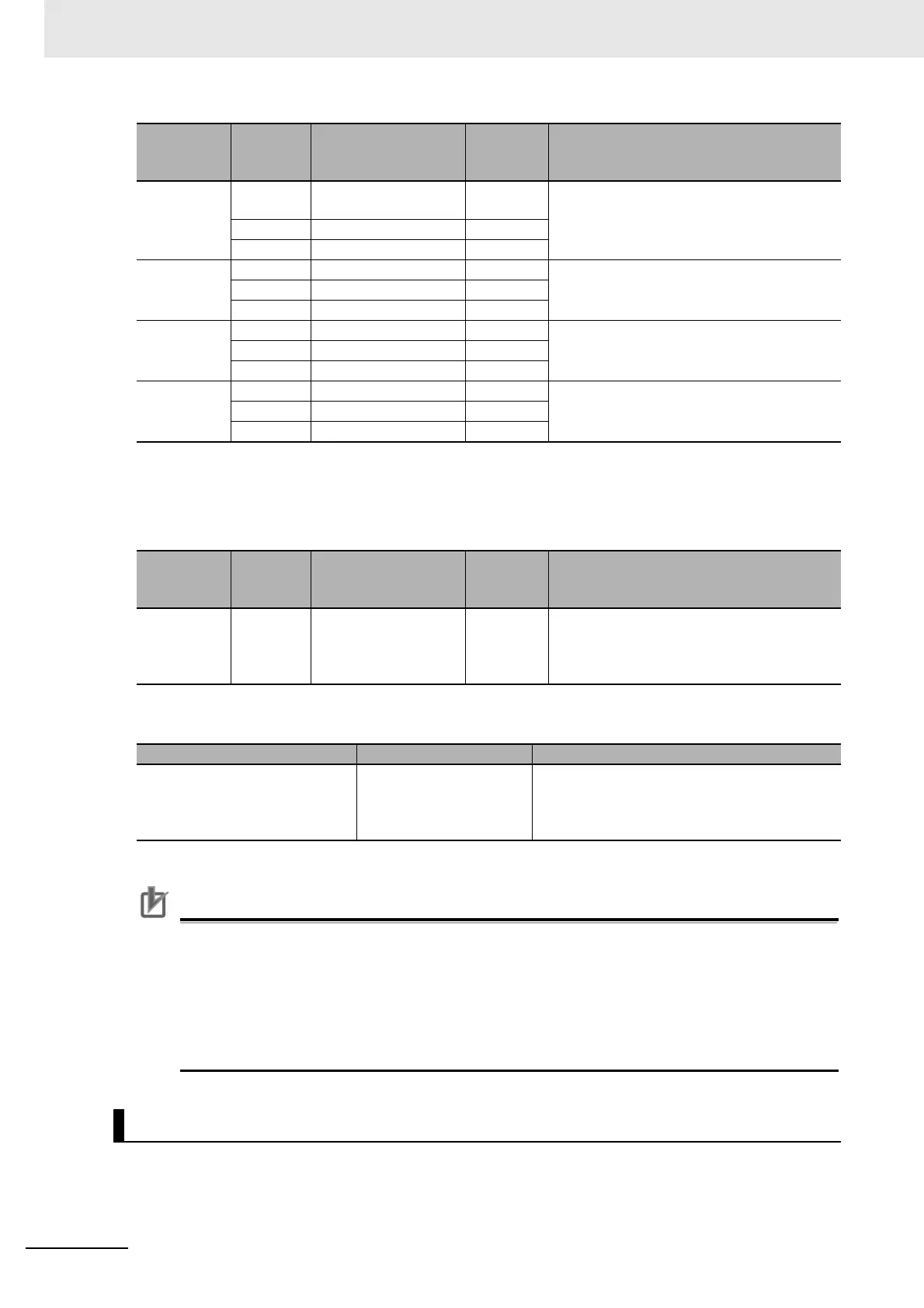
The following table shows the setting values required to use the control functions of the controller.
If you change these settings, read and understand the relevant specifications in advance and set
appropriate values.
4631
---
Negative Drive Prohi-
bition Input
---
The Negative Drive Prohibition Input is allo-
cated to General Input 3 (IN3) with negative
logic (NC contact).
01 Port Selection 3
02 Logic Selection 1
4632
---
External Latch Input 1
---
The External Latch Input 1 is allocated to
General Input 7 (IN7) with positive logic (NO
contact).
01 Port Selection 7
02 Logic Selection 0
4633
---
External Latch Input 2
---
The External Latch Input 2 is allocated to
General Input 8 (IN8) with positive logic (NO
contact).
01 Port Selection 8
02 Logic Selection 0
4634
---
Home Proximity Input
---
The Home Proximity Input is allocated to
General Input 4 (IN4) with positive logic (NO
contact).
01 Port Selection 4
02 Logic Selection 0
*1. If the unit version of the NJ/NX-series CPU Units is 1.10 or earlier, some Servomotors cannot be driven at the
maximum rotation speed. In such a case, set the electronic gear ratio of the Servo Drive to 2:1 or higher.
Index (hex)
Subindex
(hex)
Name
Recom-
mended
setting
Description
2200 00 Communications Error
Setting
2 or more Set the value to 2 or more because one com-
munications error occurs when the ring is
broken or during the restoration. The default
value is 1.
Item Recommended setting Description
Watchdog Time of Safety Pro-
cess Data Communications Set-
tings
Auto set value + EtherCAT
communications cycle × 2
or more
*1
*1. If EtherCAT communications cycle × 2 is less than 3 ms, add 3 ms or more to the auto set value.
Make the value at least two communications
cycles larger than the auto set value because
one communications error occurs when the ring
is broken or during the restoration.
Position Control Unit (Model: CJ1W-NC8)
Index (hex)
Subindex
(hex)
Name
Recom-
mended
setting
Description