9 - 63
9 Details on Servo Parameters
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
9-7 Applied Function Objects
9
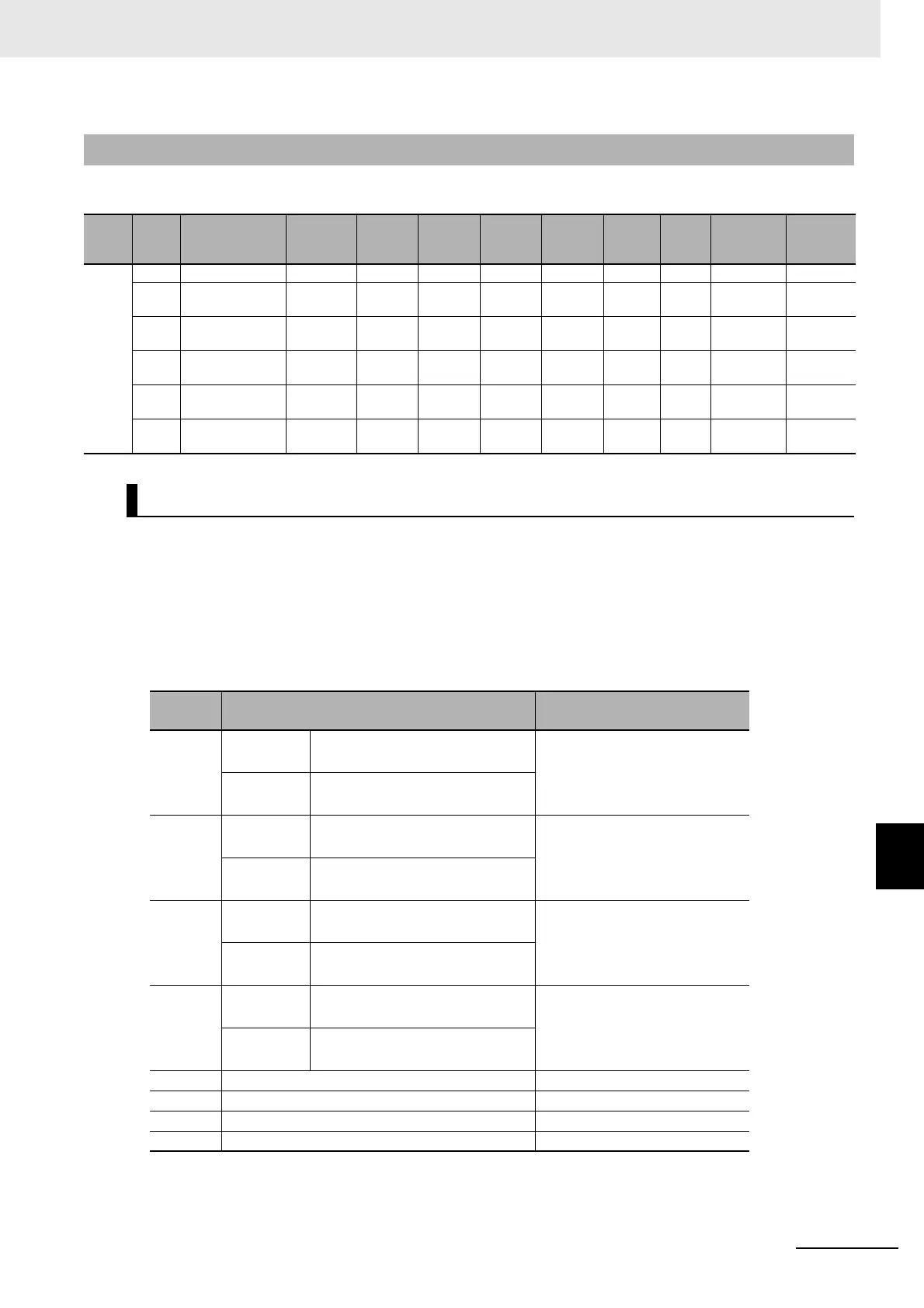
9-7-3 3B20 hex: Stop Selection
Sets the operation during stop.
• Selects the operation for the time when the PDS state machine is Shutdown.
• When the running motor decelerates and its speed reaches 30 r/min or lower, the operation changes
from the deceleration operation to the operation after stopping.
• The following error is cleared for all set values.
• Mirror object of 605B hex
Description of Set Values
9-7-3 3B20 hex: Stop Selection
Index
(hex)
Sub-
index
(hex)
Object name
Setting
range
Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Complete
access
Modes of
operation
3B20 --- Stop Selection --- --- --- --- --- --- --- Possible ---
00 Number of
entries
--- --- 04 hex --- 1 byte
(U8)
RO --- --- ---
01 Shutdown
Option Code
-7 to 0 --- -5 C 2 bytes
(INT16)
RW --- --- ---
02 Disable Opera-
tion Option Code
-6 to 0 --- -4 C 2 bytes
(INT16)
RW --- --- ---
03 Halt Option
Code
1 to 3 --- 1 C 2 bytes
(INT16)
RW --- --- pp, pv, hm
04 Fault Reaction
Option Code
-7 to 0 --- -4 C 2 bytes
(INT16)
RW --- --- ---
Subindex 01 hex: Shutdown Option Code
Set
value
Deceleration operation
Operation after stopping
-7 Operation
A
*1
*1. The Servomotor stops according to the setting of Operation B while in an STO status or
when the P-N Voltage drops to the specified value or lower. In other cases, the Servomotor
decelerates to stop according to the setting of Operation A.
Deceleration stop (The decelera-
tion stop torque is used.)
Free
Operation
B
*1
Free-run
-6 Operation
A
*1
Deceleration stop (The decelera-
tion stop torque is used.)
Free
Operation
B
*1
Dynamic brake operation
-5 Operation
A
*1
Deceleration stop (The decelera-
tion stop torque is used.)
Dynamic brake operation
Operation
B
*1
Free-run
-4 Operation
A
*1
Deceleration stop (The decelera-
tion stop torque is used.)
Dynamic brake operation
Operation
B
*1
Dynamic brake operation
-3 Dynamic brake operation Free
-2 Free-run Dynamic brake operation
-1 Dynamic brake operation Dynamic brake operation
0 Free-run Free