11 Adjustment Functions
11 - 32
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
1 Set Inertia Ratio (3001-01 hex).
Set the inertia ratio as accurate as possible.
• If the inertia ratio is calculated when the Servomotor is selected, input the calculated value.
• If the inertia ratio is unknown, use the load characteristic estimation or easy tuning function to
set the inertia ratio.
2 Adjust ODF Torque Feed-forward - Gain (3113-01 hex).
Increase value of ODF Torque Feed-forward - Gain (3113-01 hex) little by little.
Since the following error during constant acceleration/deceleration can be close to 0, it can be
controlled almost to 0 throughout the entire operation range in a trapezoidal velocity pattern
under ideal condition where no disturbance torque is applied.
In reality, disturbance torque is always applied and, therefore, the following error cannot be
completely 0.
You can reduce the following error in a constant acceleration range by using the torque feed-for-
ward.
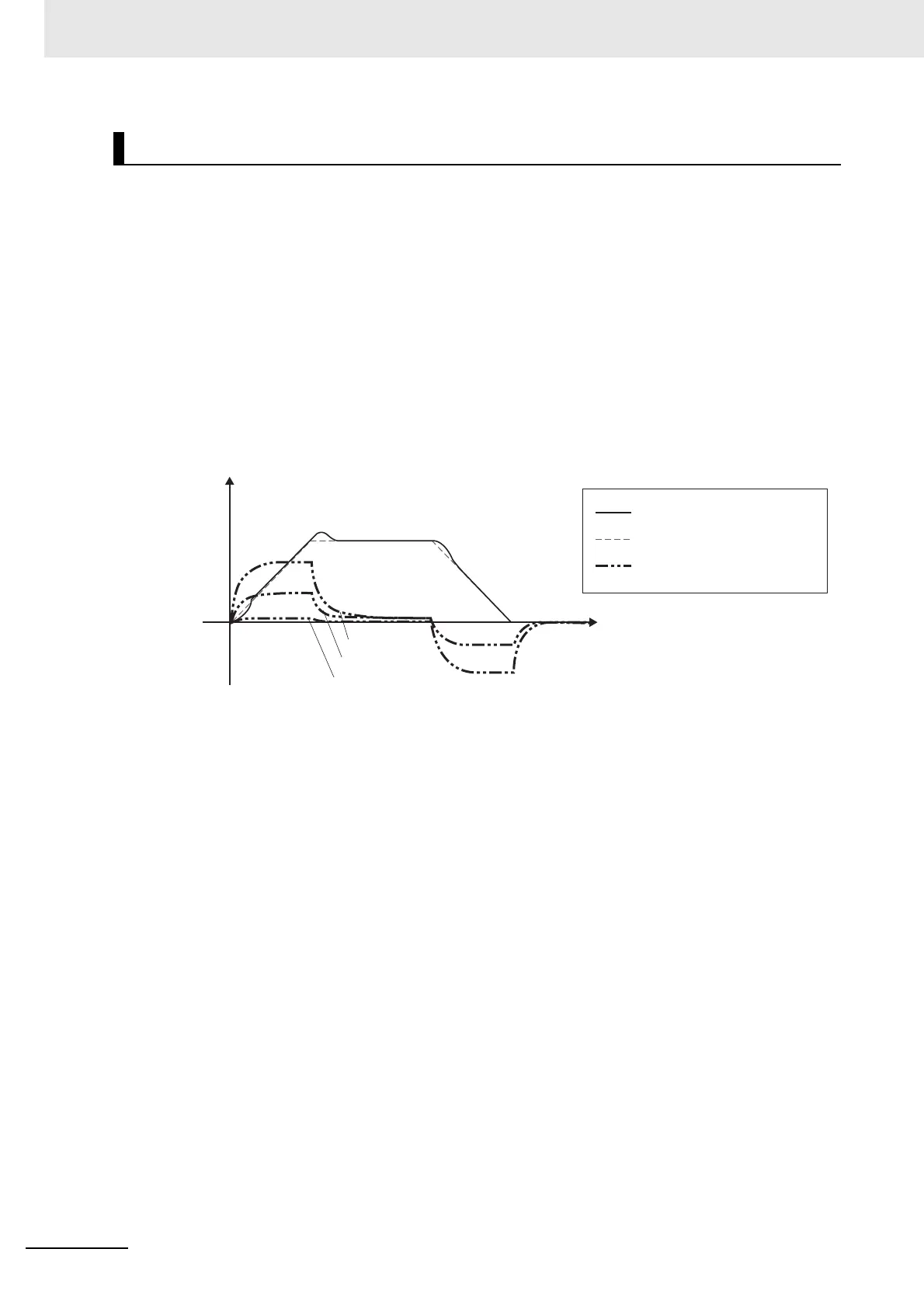
Operating Method of ODF Torque Feed-forward
0 [%]
50 [%]
100 [%]
Amount of velocity feed-forward = 100 [%] fixed
Amount of torque
feed-forward
Present Motor Velocity
Position Command – Motor Velocity
Following error
Time