A - 149
Appendices
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
A-4 Sysmac Error Status Codes
A
A-4-2 Error Descriptions
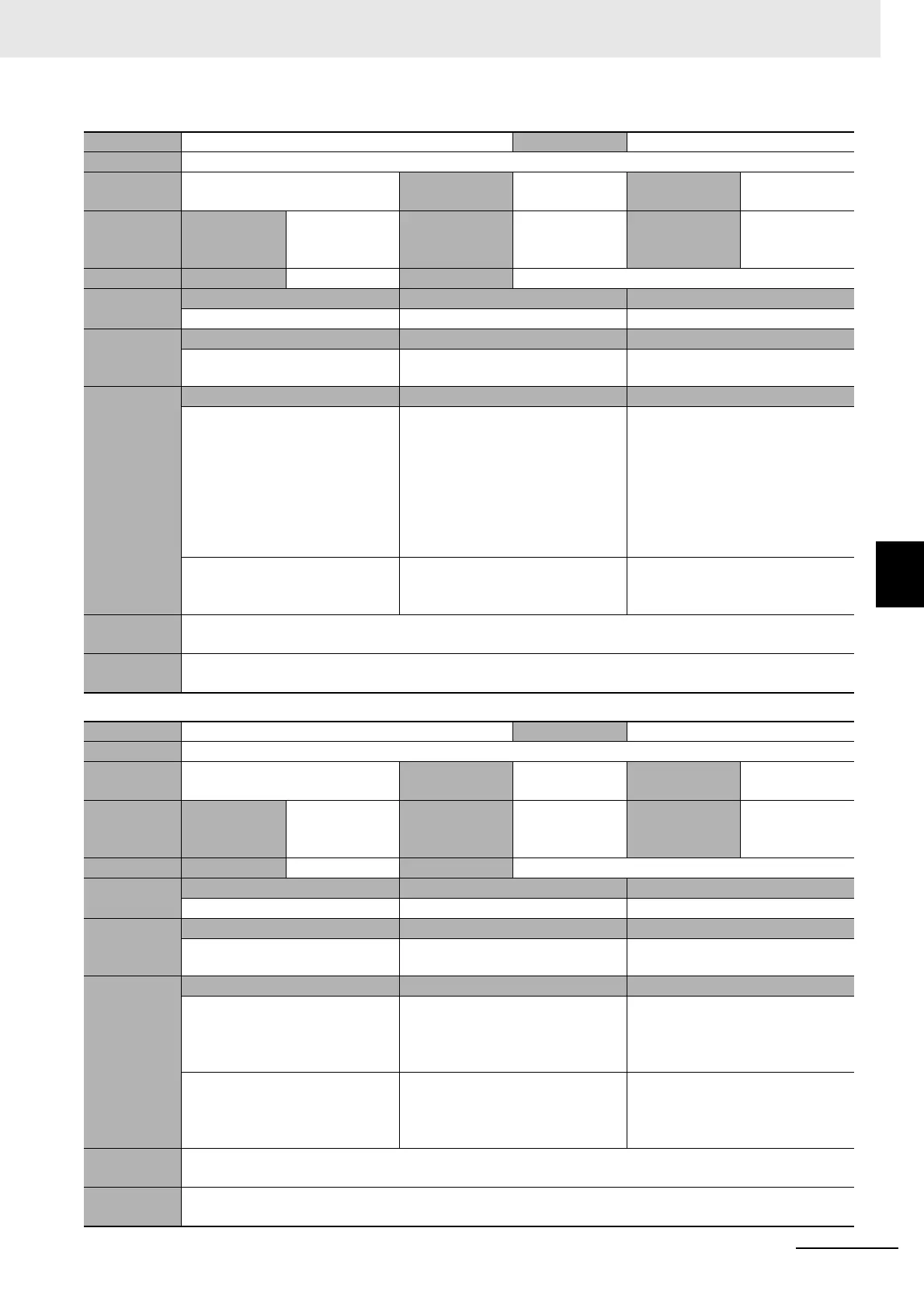
Event name Following Error Counter Overflow Event code 38860000 hex
Meaning The following error value exceeded the range from -2147483648 to 2147483647.
Source
EtherCAT Master Function Mod-
ule
Source details
Slave
Detection
timing
During Servo
ON
Error
attributes
Level
Minor fault
Recovery
Error reset
(after resetting
slave errors)
Log category
System log
Effects User program Continues. Operation Power drive circuit is OFF
Indicators
EtherCAT NET RUN EtherCAT NET ERR EtherCAT LINK/ACT
--- --- ---
System
-defined
variables
Variable Data type Name
None None None
Cause and
correction
Assumed cause Correction Prevention
The motor operation does not fol-
low the command
Identify and remove a cause that
limits the motor operation. During
the acceleration/deceleration, the
command may not be followed
depending on operation patterns.
In that case, change the operation
pattern by increasing the accelera-
tion/deceleration time or the like.
Adjust the gain and limit values
appropriately before use.
Set the operation pattern appropri-
ately according to the connected
load.
The Servomotor is rotated or lim-
ited on the operation by external
forces
Take countermeasures so that the
motor is not subjected to external
forces.
Take countermeasures so that the
motor operation is not interfered by
external forces.
Attached
information
None
Precautions/
Remarks
AL status code: -, Error No.: 2903 hex
Event name Absolute Encoder Counter Overflow Error Event code 38870000 hex
Meaning The multi-rotation counter of the encoder exceeded the maximum number of rotations.
Source
EtherCAT Master Function Mod-
ule
Source details
Slave
Detection
timing
Continuously
Error
attributes
Level
Minor fault
Recovery
Error reset
(after cycling
slave power)
Log category
System log
Effects User program Continues. Operation Power drive circuit is OFF
Indicators
EtherCAT NET RUN EtherCAT NET ERR EtherCAT LINK/ACT
--- --- ---
System
-defined
variables
Variable Data type Name
None None None
Cause and
correction
Assumed cause Correction Prevention
An inappropriate value was set in
the Encoder – Operation Selec-
tion when Using Absolute
Encoder (4510-01 hex)
Set the appropriate value in the
Encoder - Operation Selection
when Using Absolute Encoder
(4510-01 hex).
Set the appropriate value in the
Encoder - Operation Selection
when Using Absolute Encoder
(4510-01 hex).
The multi-rotation number of the
encoder exceeded the maximum
number of rotations
Set the travel distance so that the
multi-rotation number does not
exceed the maximum number of
rotations.
Set the travel distance so that the
multi-rotation number does not
exceed the maximum number of
rotations.
Attached
information
None
Precautions/
Remarks
AL status code: -, Error No.: 4100 hex