4 - 21
4 System Design
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
4-2 Wiring
4
4-2-2 Main Circuit and Linear Motor Connections
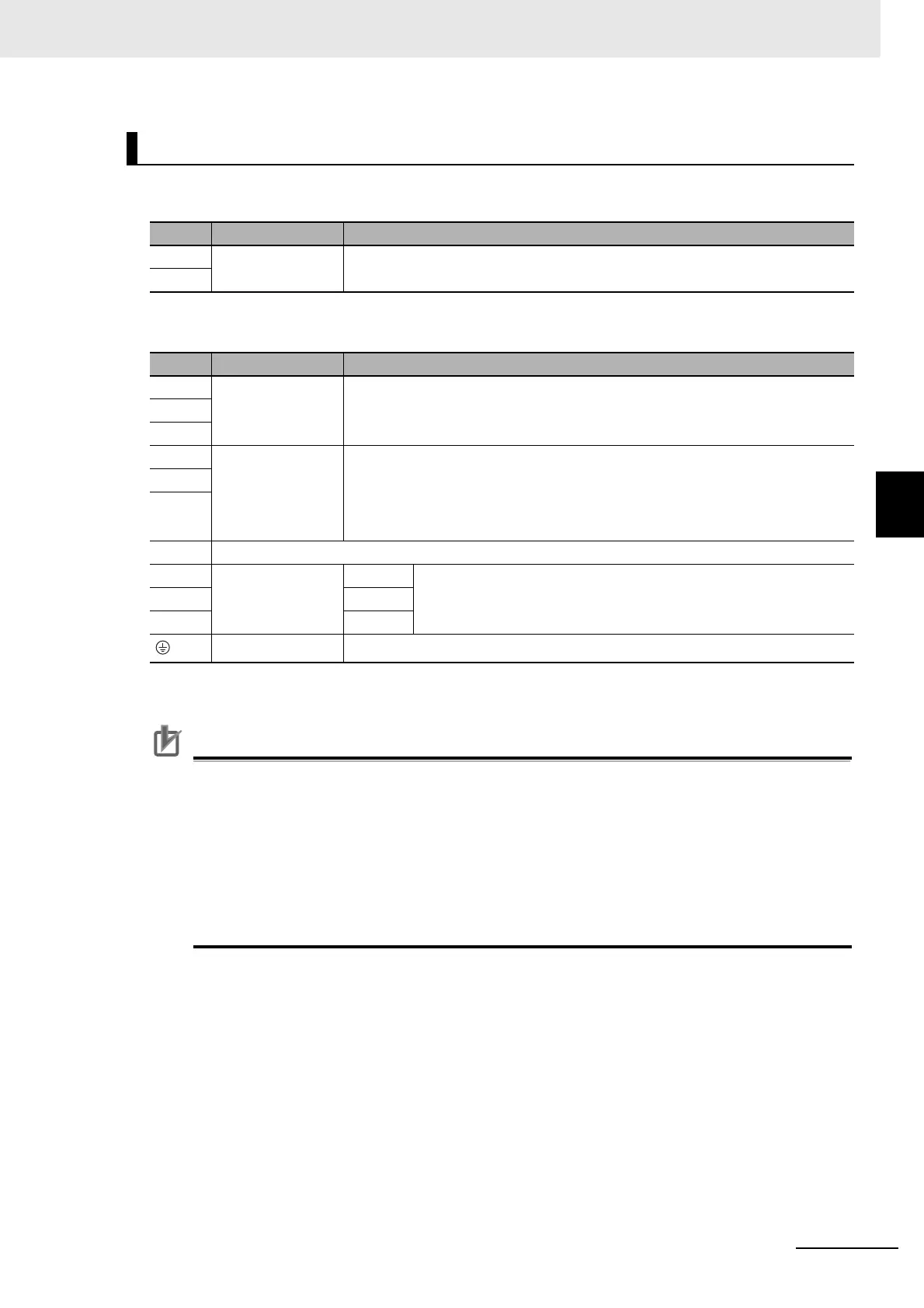
z Control Circuit Terminal Block Specifications (TB1)
z Main Circuit Terminal Block Specifications (TB2)
*1 Do not short B1 and B2. Malfunction may result.
Precautions for Correct UsePrecautions for Correct Use
• Tighten the frame ground screw to a torque of 1.4 to 1.6 N·m (M5).
• Tighten the 24-V terminal block screws to a torque of 0.4 to 0.6 N·m (M3).
• Tighten the terminal block screws to a torque of 0.7 to 1.0 N·m (M4). Exceeding the maximum
allowable torque for terminal block screws may cause damage to the terminal block.
• Tighten the bottom terminal block screws to a torque of 0.19 to 0.21 N·m (M3).
• If you connect an External Regeneration Resistor, set the Regeneration Resistor Selection
servo parameter object (3016 hex).
• Do not connect an external regeneration resistor between the B1 and NC terminals.
R88D-KN30F-ECT-L
Symbol
Name Function
24 V Control circuit
power supply input
24 VDC (20.4 to 27.6 VDC)
0 V
Symbol
Name Function
L1 Main circuit power
supply input
3-phase 380 to 480 VAC (323 to 528 VAC) 50/60 Hz
L2
L3
B1 External
Regeneration
Resistor
connection
terminals
*1
Normally B2 and B3 are shorted.
If there is high regenerative energy, remove the short-circuit bar between B2 and
B3 and connect an External Regeneration Resistor between B1 and B2.
B3
B2
NC Do not connect.
U Motor connection
terminals
Phase U These are the output terminals to the Linear Motor.
Be sure to wire them correctly.
V Phase V
W Phase W
Frame ground This is the ground terminal. Ground it to 100 Ω or less.

 Loading...
Loading...
