9 Servo Parameter Objects
9 - 24
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
• The Position Command Filter Time Constant is the first-order lag filter that is inserted after the
electronic gear ratio for the command input.
• This constant is used to reduce the stepping movement of the motor to achieve a smooth operation
when the electronic gear ratio is set to 10 or greater.
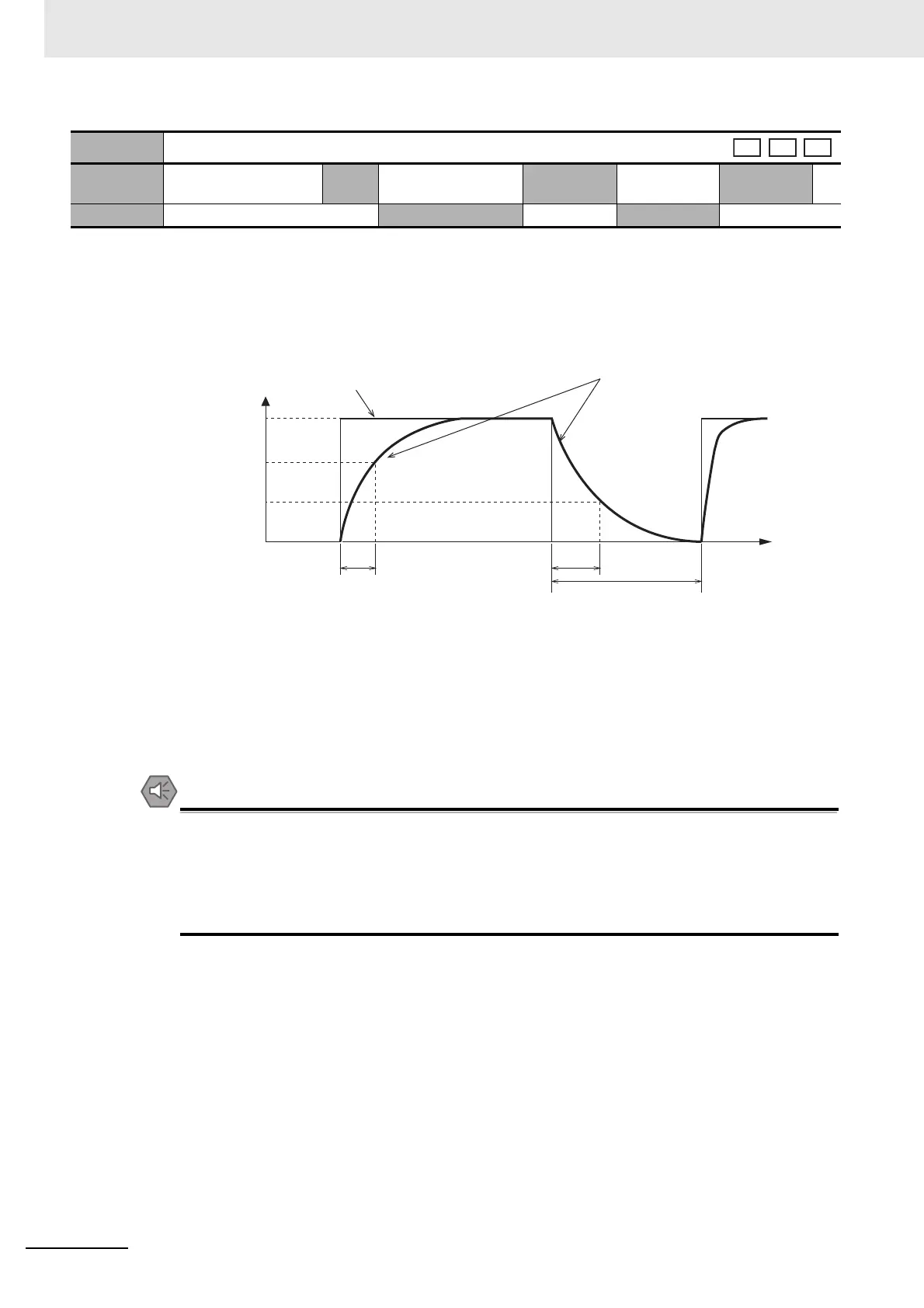
• It sets the first-order lag filter time constant, as shown below, for the square-wave command of target
speed Vc.
*1 The error in the position command filter time constant is 0.4 ms max. (absolute error) for less than 100 ms and
0.2 ms max. (relative error) for 20 ms or greater for the set value times 0.1 ms.
*2 The Position Command Filter Time Constant (3222 hex) is switched when the position command value per
0.250 ms changes from 0 to a value other than 0 while the positioning completed output is ON.
*3 There is a delay from when the Position Command Filter Time Constant (3222 hex) is changed until the new
value is applied in internal calculations. If the filter switch wait time expires during this delay, the change may
be placed on hold.
If a large Position window is set, decreasing the Position Command Filter Time Constant may
cause a sudden motor movement immediately after switching.
This occurs due to the pulses accumulated in the filter at the time of switching, which are
distributed rapidly after switching to restore the normal position.
Be careful as the motor may temporarily move faster than the expected command speed.
3222 hex
Position Command Filter Time Constant
Setting
range
0 to 10,000
Unit
0.1 ms
Default
setting
0 Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible
csp
hm
t
f
t
f
Vc×0.632
*1
Vc×0.368
*1
t
f
= (3222 hex
*3
× 0.1 ms)
Vc
Filter switching
dwell time
*2
Time
Speed
Input position command
Position command after the
smoothing filter process
Target speed

 Loading...
Loading...
