9 Servo Parameter Objects
9 - 44
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
• Sets the Motor’s allowable operating range for the position command input range.
• If the set value is exceeded, and Overrun Limit Error (Error No. 34.0) will occur.
For details, refer to 7-3 Overrun Protection on page 7-11.
• Select the signal read cycle for control input (digital input).
• The External Latch Inputs 1, 2 and 3 (EXT1, 2, and 3) are excluded.
• The Servo Drive reads input signals 3 times in the set cycle. If the Servo Drive reads the same signal
3 times in a row, it will be accepted as the input signal.
Explanation of Settings
• Select the setting unit of Position window (6067 hex), Position Completion Range 2 (3442 hex) and
Following error window (6065 hex).
Explanation of Settings
Precautions for Correct UsePrecautions for Correct Use
• Detection of the Positioning Completed status in EtherCAT communications is always
performed using command units, regardless of the setting on this object.
• Normally, use the default setting of 0 (command units).
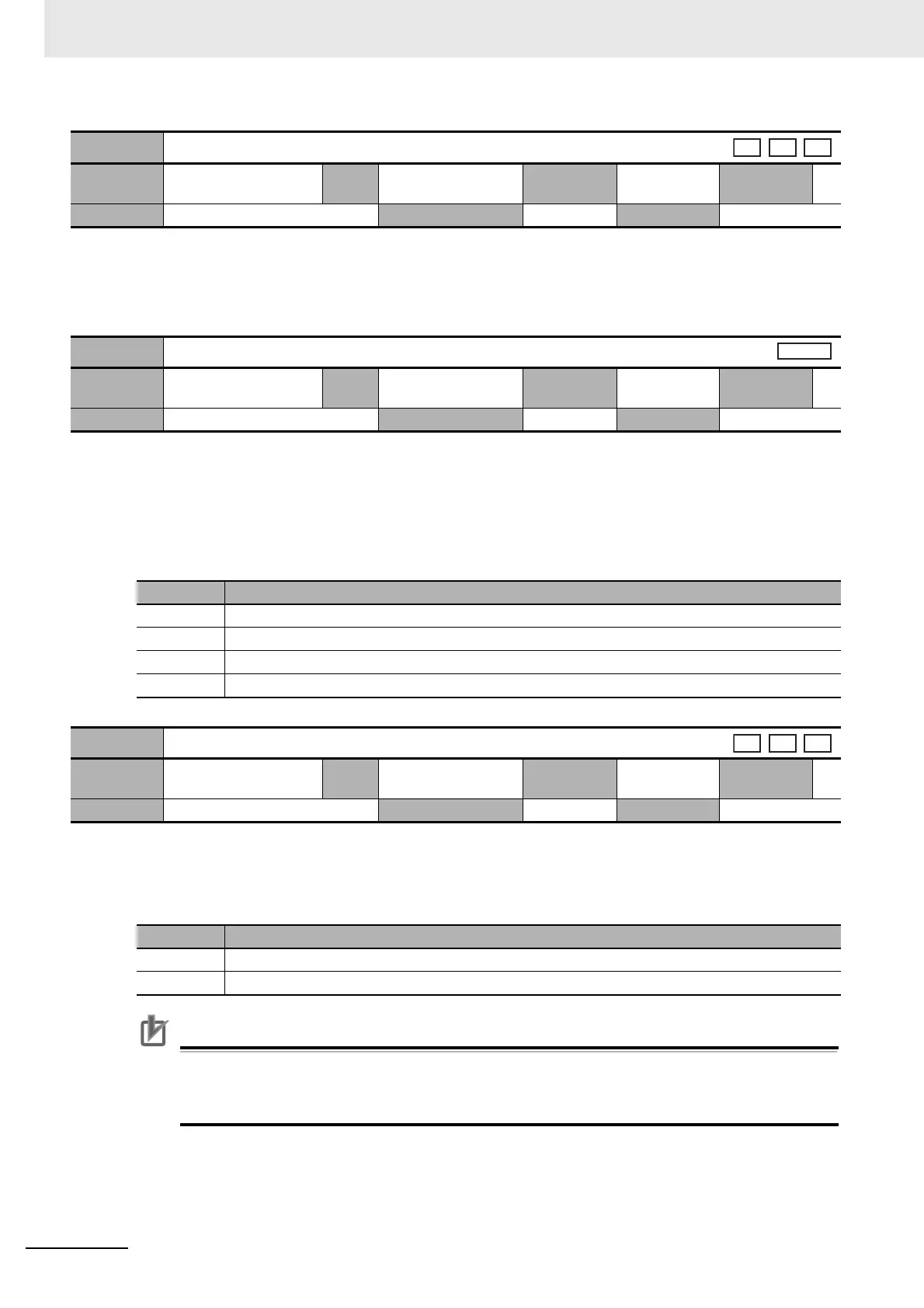
3514 hex
Overrun Limit Setting
Setting
range
0 to 1,000
Unit
0.1 magnetic pole
pitch
Default
setting
10 Data
attribute
A
Size 2 bytes (INT16) Access RW PDO map Not possible
3515 hex
Control Input Signal Read Setting
Setting
range
0 to 3
Unit
–
Default
setting
0 Data
attribute
C
Size 2 bytes (INT16) Access RW PDO map Not possible
Set value Description
0 0.250 ms
1 0.500 ms
2 1.5 ms
3 2.5 ms
3520 hex
Position Setting Unit Selection
Setting
range
0 to 1
Unit
–
Default
setting
0 Data
attribute
C
Size 2 bytes (INT16) Access RW PDO map Not possible
Set value Description
0 Command units
1 External encoder units
csp
hm
csp
pp
hm

 Loading...
Loading...
