13
Structure of This Document
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
Structure of This Document
This manual consists of the following chapters.
Read the necessary chapter or chapters referring the following table.
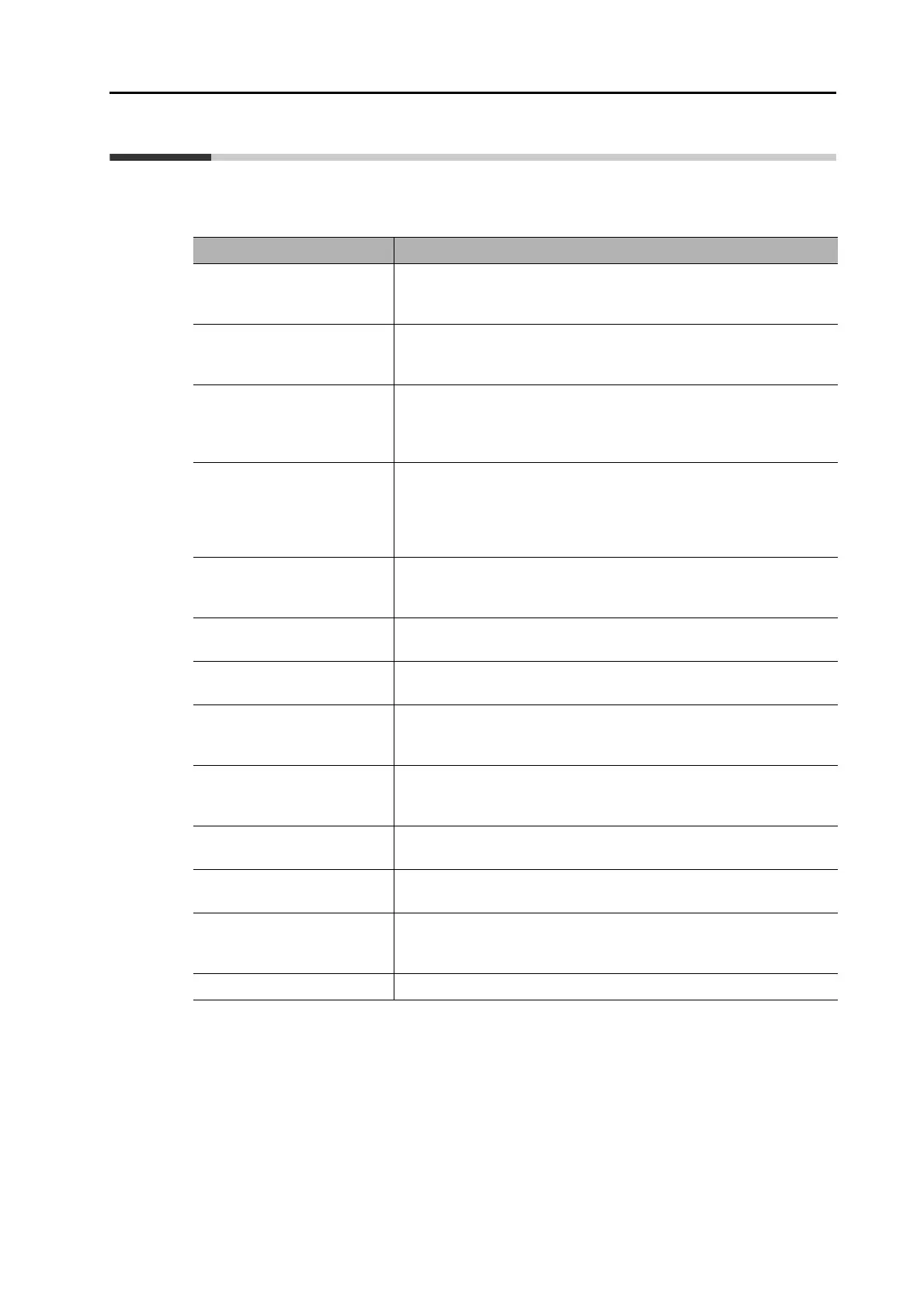
Outline
Chapter 1 Features and
System
Configuration
This chapter explains the features of the Servo Drive, name of each
part, and applicable EC Directives and UL standards.
Chapter 2 Standard Models
and External
Dimensions
This chapter explains the models of Servo Drives, Servomotors, and
peripheral equipment, and provides the external dimensions and
mounting dimensions.
Chapter 3 Specifications This chapter provides the general specifications, characteristics,
connector specifications, and I/O circuits of the Servo Drives as well as
the general specifications, characteristics, encoder specifications of
the Servomotors and other peripheral devices.
Chapter 4 System Design This chapter explains the installation conditions for the Servo Drive,
Servomotor, and Decelerator, wiring methods including wiring
conforming to EMC Directives and regenerative energy calculation
methods as well as the performance of External Regeneration
Resistors.
Chapter 5 EtherCAT
Communications
This chapter describes EtherCAT communications under the
assumption that the Servo Drive is connected to a CJ1W-NC281/
NC481/NC881/NCF81/NC482/NC882 Position Control Unit.
Chapter 6 CiA 402 Drive
Profile
This chapter describes the profile that is used to control the Servo
Drive.
Chapter 7 Applied
Functions
This chapter outlines the applied functions such as the electronic gear,
gain switching and soft start, and explains the settings.
Chapter 8 Safety Function This chapter gives an outline of application functions, such as
electronic gears, gain switching, and soft start, and explains the
settings.
Chapter 9 Details on Servo
Parameters and
Objects
This chapter explains the set values and contents of each object.
Chapter 10 Operation This chapter gives the operating procedures and explains how to
operate in each mode.
Chapter 11 Adjustment
Functions
This chapter explains the functions, setting methods, and items to note
regarding various gain adjustments.
Chapter 12 Troubleshooting
and Maintenance
This chapter explains the items to check when problems occur, error
diagnosis using the error display and measures, error diagnosis based
on the operating condition and measures, and periodic maintenance.
Appendix The appendix provides a list of objects and EtherCAT terminology.
 Loading...
Loading...
